Praktikum Produktionstechnik

Einführung
Im Praktikum "Produktionstechnik" des 7. Semesters im Studiengang Mechatronik (Schwerpunkt "Global Production Systems") werden nach dem "learning by doing" Ansatz Maschinen entwickelt, gebaut und programmiert. In Kleingruppen á 2-3 Personen wird dabei die Ansteuerung anhand von unterschiedlicher, in der Industrie und Mikrocontroller-Welt üblichen Automationshardware (Siemens, PHOENIXCONTACT, NationalInstruments, dSPACE, Arduino) selbst erstellt und programmiert. Dies schafft fundierte Kenntnisse über die Funktionsweise produktionstechnischer Maschinen! Zur Verwirklichung der Projekte steht ein "Baukasten Automatisierung" zur Verfügung.
Leitung: Prof. Dr. Mirek Göbel
Wintersemester 2022
Verdrahtungsplan mit QElectroTech
- Mechatronisches Produktionssystem zur Produktion eines HSHL-Getränkgeuntersetzers
- Mechatronisches Produktionssystem, hier Stationen Transferband und Sortieren
- Ampel-Demonstrator, bitte diese Seite darin integrieren
- Smart Home: Belüftung, Anwesenheitserkennung und Lichtalarm bei Hausklingeln eines Modellhauses mithilfe einer Phoenix Contact AXC 1050 SPS
- Bau eines 3D-FFF-Druckers mit Hilfe des Delta-Roboters Omron/Adept Quattro
Wintersemester 2021
- Ansteuerung des UR3 Roboters mit Matlab und URSim mittels Realtime Schnittstelle
- Schachspiel mittels kollaborierendem UR-Roboter unter ROS
- Mechatronisches Produktionssystem zur Produktion eines HSHL-Getränkgeuntersetzers
- Modulares mechatronisches Produktionssystem (MPS): Station Roboter: Erweiterung Akkumanagement-System für Positionssensoren
- Modulares mechatronisches Produktionssystem (MPS): Station Roboter: Inbetriebnahme und Optimierung der Ablaufsteuerung
- Reflow-Ofen mit PLC Next Control AXC F 2152
- Smart Home: Belüftung, Anwesenheitserkennung und Lichtalarm bei Hausklingeln eines Modellhauses mithilfe einer Phoenix Contact AXC 1050 SPS
- Ampel-Demonstrator Erweiterung, aufbauend auf dem Vorjahres-Projekt Ampel-Demonstrator
Wintersemester 2020
- Inbetriebnahme eines vier-achsigen Hochgeschwindigkeits-Delta Roboter zur Sortierung von Objekten
- Ampel-Demonstrator
- Ansteuerung eines Servomotors mit Inverter (SINAMICS S210) an einem Siemens SIMATIC Open Controller (ET200SP 1515SP)
- Ansteuerung einer Schrittmotorachse mit SPS und HMI
- Automatische Belüftung eines Modellhauses mithilfe einer Phoenix Contact AXC 1050 SPS
- Ansteuerung des UR3 Roboters mit Matlab und URSim mittels Realtime Schnittstelle
Projekte im Rahmen dieses Praktikums aus den Vorjahren - im Überblick
-
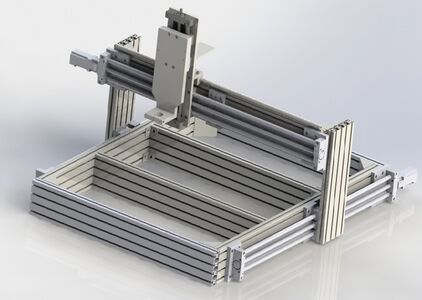 3D-CNC-Bearbeitungsmaschine
3D-CNC-Bearbeitungsmaschine -
 MechatronischesProduktionsSystem
MechatronischesProduktionsSystem -
 Automatische Legostein-Montieranlage
Automatische Legostein-Montieranlage -
 3D-Drucker
3D-Drucker -
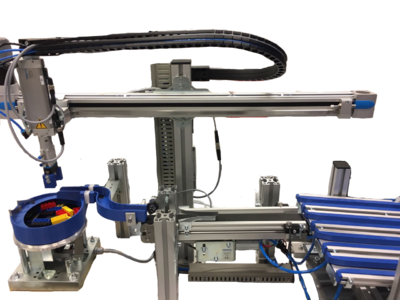
 Roboter-Zelle mit Delta-Picker-Roboter
Roboter-Zelle mit Delta-Picker-Roboter
Projekte im Rahmen dieses Praktikums aus den Vorjahren - im Detail
3D-CNC-Maschine

Allgemeingültige Artikel:
- Schrittmotor
- Schrittmotoransteuerung mit Gecko Drive
- Mikrocontrollerboard Arduino Mega 2560
- Automatisierungssystem SPS SIMATIC S7-300
- Automatisierungssystem dSpace DS1104 R&D Controller Board
Ansteuerung:
- Ansteuerung einer Schrittmotor-Achse mit Siemens SIMATIC S7-300 SPS
- Ansteuerung einer Schrittmotor-Achse mit PHOENIXCONTACT AXC 1050
- Ansteuerung_einer_Schrittmotor-Achse_mit_dSpace_DS1104 und_Matlab/Simulink
- Ansteuerung einer Schrittmotor-Achse mit Mikrocontrollern am Beispiel eines Arduino-Mega
- Ansteuerung einer Schrittmotor-Achse mit NI Labview
- Zentraler Steuerungsalgorithmus für ein 3-Achs-CNC-Bearbeitungszentrum
- Zentraler Steuerungsalgorithmus für ein 3-Achs-CNC-Bearbeitungszentrum mit Matlab/GUIDE
- Computer Aided Manufacturing (CAM)
Konstruktion:
- Konstruktion eines 3-Achs-CNC-Bearbeitungszentrums
- Weiterentwicklung eines 3-Achs-CNC-Bearbeitungszentrums mit neuen Spindelantrieben
- Erweiterung/Fehlerbehebung an dem 3-Achs-CNC-Bearbeitungszentrums und Konstruktion eines Außengehäuses
- Konstruktion, Fertigung und Inbetriebnahme eines Rundtisches (4.Achse)
- 2D-Styroporschneidewerkzeug für 3D-CNC-Bearbeitungsmaschine