Projekt 32b: Komplexer Sensor für Lego Mindstorms EV3

Autoren: Leger Paco Kamegne Kamdem, Ferry Rossini Nde
Betreuer: Prof. Schneider
→ zurück zur Übersicht: WS 18/19: Fachpraktikum Elektrotechnik (MTR)
Aufgabe
Entwickeln Sie einen komplexen Sensor für Lego Mindstorms EV3.
Erwartungen an Ihre Projektlösung
- Darstellung der Theorie
- Realisierung des Aufbaus
- Platinenlayout und Gehäuse kompatibel zum Lego Stecksystem (montierbar)
- Kommunikation über I2C
- Schaltungsentwurf und Simulation mit NI CD
- Programmierung des Microcontrollers (z.B. Attiny)
- Treiber für EV3 Lobby
- Test und Dokumentation
- Live Vorführung während der Abschlusspräsentation
- Kür: Treiber für Matlab und Simulink
Hinweis: Grenzen Sie sich inhaltlich von den Projekten der Vorjahre ab.
Einleitung
In diesem Artikel wird der Aufbau und die Programmierung eines Lego EV3 und eines Arduino UNO erklärt. Das Ziel des Projekt ist ein komplexer Sensor für Lego Mindstorms zu entwickeln, in dem Fall ein IR-Abstandsensor (Sharp GP2Y0A41SK0F). Der Sensor soll den Abstand zwischen seinen Position und einen Hindernis messen, von Arduino ausgelesen werden, und durch I2C im EV3-Display ausgegeben werden.
Projekt
Die Daten des Infrarotsensors sollen vom einem Atmel ATtiny 84 (8-Bit Mikrocontroller) eingelesen und am EV3-Brick ausgegeben werden.
Projektziel

Abbildung 2: Zweiter Einsatz
Projektdurchführung
Bevor wir die Verbindung mit ATtiny84 durchführen, werden wir erstmal mit Arduino Uno vorführen.
Erster Einsatz mit Arduino

Abbildung 3: Erster Einsatz
Software (Softwarearchitektur, -entwurf)
- Arduino Uno programmieren
-> Arduino Uno konfigurieren, so dass er als Slave (I2C) betrachten wird und zwar mit einer
bestimmten Programm : - - - - - - . - EV3 programmieren
-> Ev3 konfigurieren, so dass er als Master betrachten wird und zwar mit I2C Treiber und
einem bestimmten Programm : - - - - .
Hardware (Systemarchitektur, -entwurf)
- Aufbau
-> Verbindung zwischen Arduino Uno und EV3
-> Prototyp
Der EV3-Brick, der Arduino UNO und der Sensor werden über die nachfolgende Pinbelegung verschaltet.

Abbildung 4: Verbindung zwischen Arduino Uno, EV3-Brick und den IR Sensor
-> ....
Zweiter Einsatz mit Atmel ATtiny
Aufgrund der üppigen Bauform des Arduino Uno wird im zweiten Ansatz versucht die Bauform zu reduzieren. Hierzu wird das Arduino Board durch ein Atmel ATtiny 84 (8-Bit Mikrocontroller) auf einer selbstgefrästen Platine ersetzt. Die Programmierung von Atmel ATtiny erfolgt durch Arduino Uno. Dafür müssen wir Arduino Uno und Atmel ATtiny verbinden.
Software (Softwarearchitektur, -entwurf)
- ATtiny84 programmieren -> ATtiny84 wird durch Arduino Uno programmiert. -> erstmal wird ATtiny84 gefläscht, mit einem bestimmten Konfiguration. -> als Probe haben wir ein LED blinken lassen ( das funktioniert tatsächlich ). -> ATtiny84 als Slave konfigurieren - EV3 programmieren -> Bei EV3 bleibt unverändert
Hardware (Systemarchitektur, -entwurf)
Aufbau Bevor man den EV3-Brick mit ATtiny84 verbindet, sollte erstmal den ATtiny gefläscht werden. Und zwar wie folgende könnte die Schaltplan aussehen. Da haben wir 2 Dioden reingebaut, damit bei der Stromversorgung der Strom nur in eine Richtung vorkommen muss.

Abbildung 5: Verbindung zwischen EV3-Brick, Arduino Uno, ATtiny84 und den IR-Sensor
Nachdem wir alles erfolgreich gefläscht haben und das Programm in der ATtiny rübergespielt wurde, haben wir wie folgende die Pinbelegung verschaltet.

Abbildung 6:Verbindung von ATtiny84 und Arduino 42 Bots (2013): Programming ATtiny84 with Arduino Uno

Abbildung 7: Pinbelegung von ATtiny84 Atmel: ATtiny84 - Datasheet

Abbildung 8: Verbindung zwischen ATtiny84, Arduino Uno und EV3-Brick Mehr Info : Dexter Industries: Connecting the EV3 to Arduino
-> Prototyp -> Fertig gelötet

Abbildung 9: Prototyp (ATtiny84, EV3-Anschluss und Sensor-Pin)
Der Infrarotsensor lässt sich über die 3 Leitungen (VCC, GND und Datenleitung) mit dem Arduino UNO verschalten. Da im EV3-Programm der Eingangs-Pin des Slaves mit Pin=4 definiert wurde, muss die Datenleitung des Infrarotsensors am Eingang A1 anliegen. Die Versorgungsspannung des Infrarotsensors liegt an 5V an. Die Masse entspricht der Masse des Arduino UNO.

Abbildung 10: Durchführung der Messung
Ergebnisse
Wie oben erwähnt, sollten wir zwei Einsätze durchführen. Beim Ersten Einsatz sind wir wie folgendes eingegangen:
- Den Arduino Uno als Slave konfiguriert, so dass er den Befehl ausführt. Und zwar Die Rohrwerte von dem Infrarot Sensor auslesen und durch I2C zu EV3 (Master) die Werte weiterleiten. - Den EV3 als Master sollte die Werte in cm übersetzen und ausgeben. Dafür muss den EV3 auch konfiguriert bzw. mit bestimmten I2C Treiber Programmiert werden. Denn die Kommunikation erfolgt durch I2C.
Wenn diese Schritte richtig durchgeführt sind, funktionier das einwandfrei.
Zweiter Einsatz
- Der ATtiny84 als Slave konfiguriert - EV3 bleibt unverändert
Nach der Ausführung der Schritten kommt seltsame Werte von dem EV3 raus.
Herausforderungen
1- Aufbau : Löten
Bei dem Aufbau haben wir grundsätzlich Schwierigkeiten beim Löten begegnet. Denn hatten wir beide noch nie irgendwas gelötet.
2- EV3 Programmierung :
Um der EV3 als Master zu programmieren. müssten wir I2C-Treiber recherchieren und herunterladen. Den passenden zu finden war nicht einfacht. Müssten wir eine lange Internet-Recherche durchführen.
3- ATtiny84 Programmierung :
Die Programmierung des ATtiny84 war herausfordernd. Denn war nicht klar ob das Programm tatsächlich in der Tiny rein war oder eher nicht. Beim
Testen lieft nicht. Deshalb haben wir 2 Probe durchgeführt.
1. Probe: Wir haben ein simple Algorithm (LED blinken lassen) rein gespielt, um zu gucken, ob der Tiny überhaupt funktioniert.
-> Ergebnis: das LED-Programm funktioniert Einwandfrei.
2. Probe: Wir haben einen anderen Prozessor(Atmega 328) geholt (Empfehlung von den Tutoren). Atmega328 weil Arduino Uno das selbe besitzt.
-> Ergebnis: Das Programm (Endprogramm) funktioniert. Bei der Abstandmessung wird doppelt langsamer als mit Arduino Uno. Das liegt aber nicht
an den Prozessor, sondern an den Quartz (wir haben die Schaltung wegen mangeln an Quarz, ohne den Quarz gemacht.
Zusammenfassung: Das Problem liegt definitiv an der Tiny. könnte ein Hardware-Problem (1.Probe) sowie ein Software-Problem (2.Probe) sein.
Wir sind sind aber mehr oder weniger von der Meinung, dass das ein Software-Problem ist. Weil alle einfache Programme funktioniert haben.
Wenn es um I2C geht, spielt alles verruckt.
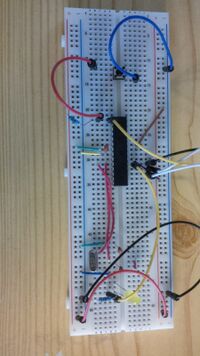

Abbildung 11: 2.Probe -> um zu prüfen, ob unfunktionalität ein Software- oder Hardware-Problem
Zusammenfassung
Lessons Learned
Wir dachten am Anfang, dass ein komplexer Sensor (IR-Sensor) für Lego Mindstorms EV3 sich gut anhört, ist aber absolut nicht der Fall. Auch wenn man statt ATtiny84 mit Arduino Uno arbeiten will, muss man schon in der Lage sein, die alle Treiber, Bibliothek und Algorithm holen bzw. programmieren zu können. Haben wir im Laufe des Projektsdurchführung viel gelernt. Von Basis des Arduino Uno bis zu I2C-Kommunikation. Mussten wir auch bei der Aufbau verschiedene praktische Anwendung, die wir während des Semesters in Vorlesungen bekommen haben. Wie z.B. löten (Produktionstechnik oder Aufbau -und Verbindungstechnik ), fräsen, Aufbau von Bauelement ( Aufbau -und Verbindungstechnik) und Arduino Uno ( Get-Fachpraktikum Termin 3).
Projektunterlagen
- BOM-Projekt 32b.xlsx
- Abstand messen mit Arduino: Schaltplan Abstand.ino
- Code: Abstand messen.ino
- https://www.ebay.de/itm/2x-Atmel-ATTiny84A-PU-und-2x-DIL-Sockel/251773573538?hash=item3a9edfd9a2:g:X~4AAOSwMpZUoV8s:rk:1:pf:0
YouTube Video
https://www.youtube.com/watch?v=oeTG0vt75Uk&t=6s
Weblinks
- [Projekt 32: http://193.175.248.52/wiki/index.php/Projekt_32:_Komplexer_Sensor_f%C3%BCr_Lego_Mindstorms_EV3]
Literatur
→ zurück zur Übersicht: WS 18/19: Fachpraktikum Elektrotechnik (MTR)