Objekterkennung mit Ultraschall mit Matlab/Simulink und EV3: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 32: | Zeile 32: | ||
|} | |} | ||
[[Datei:Sensor_vorne.png|200px|thumb|links|Abbildung 1: Sensor Vorderansicht]][[Datei:Sensor_hinten.jpg|200px|thumb|middle|Abbildung 2: Sensor Rückansicht]] | [[Datei:Sensor_vorne.png|200px|thumb|links|Abbildung 1: Sensor Vorderansicht <ref> Von Evan-Amos - Eigenes Werk, Gemeinfrei, https://commons.wikimedia.org/w/index.php?curid=33217678, Abgerufen am 09.05.2017 </ref>]] | ||
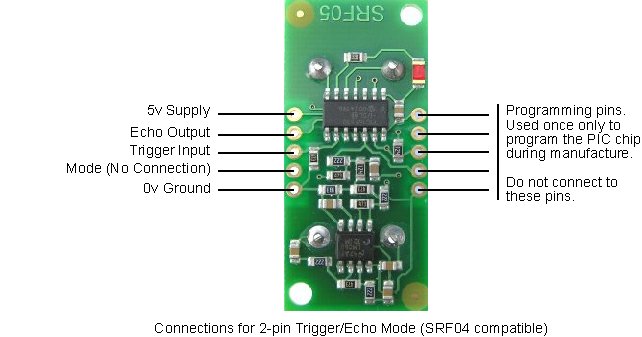
[[Datei:Sensor_hinten.jpg|200px|thumb|middle|Abbildung 2: Sensor Rückansicht <ref> https://www.robot-electronics.co.uk/images/srf05p2.jpg]]</ref>]] | |||
='''Quellen'''= | |||
'''!!!Für SVN Ordner sind die entsprechenden Zugriffsrechte erforderlich!!!''' | |||
<references /> | |||
→ zurück zum Hauptartikel: [[SigSys_SoSe2017| Signalverarbeitende Systeme SoSe2017]] | |||
Version vom 16. Juni 2017, 19:56 Uhr
Autor: Mike Westhoff
Betreuer: Prof. Schneider
→ zurück zum Hauptartikel: Signalverarbeitende Systeme SoSe2017
Aufgabenstellung
Im Fach Signalverarbeitende Systeme soll, als Semesterbegleitende Aufgabe, ein Lego Mindstorms Roboter konstruiert werden, der bei Objekterkennung innerhalb eines kritischen Bereichs eine Vollbremsung vollzieht. Bei dem Roboter handelt es sich um einen Lego Mindstorms EV3. Die Objekterkennung wird mittels eines Ultraschallsensors (SRF 05) umgesetzt. Der EV3-Roboter soll solange geradeaus fahren, bis dieser ein Objekt erkennt und vor diesem im Abstand von 5 cm anhalten (Vollbremsung). Als Software darf Matlab oder Simulink verwendet werden. Die Dokumentation der Vorgehensweise und Ergebnisse erfolgt im vorliegenden Wiki-Artikel. Zusätzlich ist ein Video zu erstellen, welches die Funktionsweise darstellt.
Vorstellung des Sensors
Technische Daten
Tabelle 1: Technische Daten SRF05 [1]
| Betriebsspannung | 5 V |
| Betriebsmode | Auslöse-Pin und Echo-Pin |
| Stromaufnahme | nur 4 mA |
| Ultraschallfrequenz | 40 kHz |
| Maximale Reichweite | 4 m |
| Minimale Reichweite | 1 cm |
| Größe | 43 mm x 20 mm x 17 mm |


Quellen
!!!Für SVN Ordner sind die entsprechenden Zugriffsrechte erforderlich!!!
- ↑ http://www.embedded.arch.ethz.ch/uploads/Examples/ExampleSensorboardSupersonic2/SRF05Datasheet.pdf
- ↑ Von Evan-Amos - Eigenes Werk, Gemeinfrei, https://commons.wikimedia.org/w/index.php?curid=33217678, Abgerufen am 09.05.2017
- ↑ https://www.robot-electronics.co.uk/images/srf05p2.jpg]]
{kind=link}
→ zurück zum Hauptartikel: Signalverarbeitende Systeme SoSe2017