Xtion Pro Live: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (12 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 80: | Zeile 80: | ||
<source lang="matlab" style="font-size:medium"> | <source lang="matlab" style="font-size:medium"> | ||
mxNiChangeDepthViewPoint.cpp | mxNiChangeDepthViewPoint.cpp | ||
c:\program files\openni\include\XnPlatform.h(58) : fatal error C1189: #error : Xiron Platform Abstraction Layer - Win32 - Microsoft Visual Studio versions above 2010 (10.0) are not supported! | c:\program files\openni\include\XnPlatform.h(58) : fatal error C1189: #error : | ||
Xiron Platform Abstraction Layer - Win32 - Microsoft Visual Studio versions above 2010 (10.0) are not supported! | |||
C:\PROGRA~1\MATLAB\R2013B\BIN\MEX.PL: Error: Compile of 'mxNiChangeDepthViewPoint.cpp' failed. | C:\PROGRA~1\MATLAB\R2013B\BIN\MEX.PL: Error: Compile of 'mxNiChangeDepthViewPoint.cpp' failed. | ||
</source> | </source> | ||
Mit GCC oder LCC geht es aber auch nicht. | |||
== Interpretation der Tiefeninformation == | |||
Der Sensor gibt Tiefeninformationen in mm aus. | |||
Die Abbildung vergleicht die Sensorwerte mit Messwerte eines Rollmaßbandes. | |||
[[Datei:Depth-Kennlinie.jpg|500px|center|Kennlinie des Xtion Tiefensensors]] | |||
Der Sensor ist ab einer Distanz von 55 cm bis 5 m einsetzbar. | |||
Beispiel: [[Medium:Example_Depth.m| Example-Depth]] | |||
Im Vergleich hierzu der [http://mathnathan.com/2011/02/depthvsdistance/ Kinect Sensor V1]. | |||
== Weiterführende Links == | == Weiterführende Links == | ||
Aktuelle Version vom 1. August 2014, 17:38 Uhr
Xtion Pro Live Spec
Verwendung der Xtion Pro Live unter Matlab
Vorraussetzung:
- Matlab R2013b 64 Bit
- Kinect Matlab by Dirk-Jan Kroon
- Visual Studio Professional 2012
- OpenNI 2.2.0
- NITE 2.2.0
- Microsoft KinectSDK v1.7 oder v1.8
1. Treiber installieren
2. Xtion anschließen
Der USB Treiber müsste automatisch gefunden werden
3. MEX-Compiler einstellen
>> mex -setup
Welcome to mex -setup. This utility will help you set up
a default compiler. For a list of supported compilers, see
http://www.mathworks.com/support/compilers/R2013b/win32.html
Please choose your compiler for building MEX-files:
Would you like mex to locate installed compilers [y]/n? y
Select a compiler:
[1] Lcc-win32 C 2.4.1 in C:\PROGRA~1\MATLAB\R2013b\sys\lcc
[2] Microsoft Visual C++ 2012 in M:\Programme\Microsoft Visual Studio 11.0
[0] None
Compiler: 2
Please verify your choices:
Compiler: Microsoft Visual C++ 2012
Location: M:\Programme\Microsoft Visual Studio 11.0
Are these correct [y]/n? y
4. Arbeitsverzeichnis wechseln
>> cd 'd:\SVN\Studentische_Arbeiten\PS_Markus_Kortmann\SRC\Kinect_Matlab_Demo\OpenNI2\'
5. .mexw32/.mexw64 Dateien compilieren
>> compile_cpp_files
6. Beispiel starten
>> Example_fps
Ergebnis ist die Darstellung der RGB- (links) und der Tiefenkamera (rechts).
Die Bilder werden mit max. 30 fps geliefert.
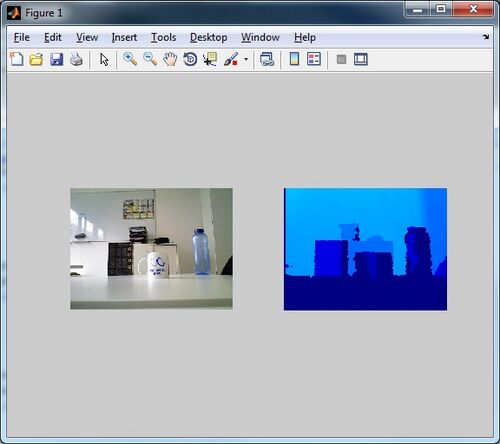
Darstellung der RGB- (links) und der Tiefenkamera (rechts)

http://193.175.248.171/wiki/index.php/
Hinweis: Der Target Installer für Kinect vom Matlab funktioniert nicht mit der Xtion Pro Live.
Using the Kinect® for Windows® from Image Acquisition Toolbox
GCC Compiler installieren
How do I install a compatible GCC or G++ compiler on a for use with MEX and the MATLAB Compiler?
Versuch 2 - OpenNI Version 1
Aus Neugierde probiere ich die Installation der Version 1 aus:
- OpenNI 1.5.4.0
- NITE 1.5.2.21
- SensorKinect093 v5.1.2.1
Fazit
OpenNI lässt sich nicht mit MSVC 2012 compilieren.
mxNiChangeDepthViewPoint.cpp
c:\program files\openni\include\XnPlatform.h(58) : fatal error C1189: #error :
Xiron Platform Abstraction Layer - Win32 - Microsoft Visual Studio versions above 2010 (10.0) are not supported!
C:\PROGRA~1\MATLAB\R2013B\BIN\MEX.PL: Error: Compile of 'mxNiChangeDepthViewPoint.cpp' failed.
Mit GCC oder LCC geht es aber auch nicht.
Interpretation der Tiefeninformation
Der Sensor gibt Tiefeninformationen in mm aus.
Die Abbildung vergleicht die Sensorwerte mit Messwerte eines Rollmaßbandes.

Der Sensor ist ab einer Distanz von 55 cm bis 5 m einsetzbar.
Beispiel: Example-Depth
Im Vergleich hierzu der Kinect Sensor V1.