RoboSoccer Gruppe A3 - WS 18/19: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (53 dazwischenliegende Versionen von 4 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
'''Autoren:''' [[Benutzer: Florian Leben | Florian Leben]] | '''Autoren:''' [[Benutzer: Florian Leben | Florian Leben]] ,[[Benutzer: Robin Grimm | Robin Grimm]] und [[Benutzer:Thomas Datche|Thomas Datche]] | ||
[[Datei:plakat maximus.PNG|400px|thumb| | |||
Dozent: [[Benutzer:Ulrich Schneider|Prof. Dr. U. Schneider]] | |||
[[Datei:plakat maximus.PNG|400px|thumb|Werbeposter <ref> Eigenes Foto </ref>]] | |||
==Einleitung== | ==Einleitung== | ||
Ein wesentlicher Bestandteil des Informatik Moduls bestand aus dem Informatikpraktikum 1, in welchem wir ausgehend von einer konkreten Problemfeldbeschreibung, aus einem Lego NXT Bausatz einen Roboter konstruieren und programmieren mussten. Um die gestellte Aufgabenstellung selbständig zu erfüllen, mussten die Auswahl der Sensoren, Aktoren und deren Programmierung durch sinvolles Zeit-/ und Projektmanagement geprägt sein. | |||
Jeder Roboter wurde in 2-3er Gruppen von Studenten entwickelt, mit dem Ziel ein RoboSoccer Turnier zu gewinnen, welches am letzten Praktikumstermin stattgefunden hat. | |||
* [[Regelwerk_RoboSoccer_2018|Regelwerk]] | |||
* [[RoboSoccer WS 18/19|RoboSoccer]]-Turnier | |||
== Gruppenmitglieder und ihre Aufgaben == | == Gruppenmitglieder und ihre Aufgaben == | ||
| Zeile 12: | Zeile 17: | ||
=== [[Benutzer:Florian Leben|Florian Leben]] === | === [[Benutzer:Florian Leben|Florian Leben]] === | ||
* Konstruktion des Roboters | * Konstruktion des Roboters | ||
* Entwicklung der Spielstrategie | * Entwicklung der Spielstrategie mithilfe des PAP-Designers | ||
* Umsetzung der Spielstrategie in Quellcode | * Umsetzung der Spielstrategie in Quellcode | ||
* Entwurf des Werbeplakats | * Entwurf des Werbeplakats | ||
* | * Nachbildung des Roboters im Lego Digital Designer | ||
* | * Erstellung des Videos | ||
=== [[Benutzer:Robin Grimm|Robin Grimm]] === | === [[Benutzer:Robin Grimm|Robin Grimm]] === | ||
* Entwicklung der Spielstrategie | * Konstruktion des Roboters | ||
* Entwicklung der Spielstrategie mithilfe des PAP-Designers | |||
* Umsetzung der Spielstrategie in Quellcode | * Umsetzung der Spielstrategie in Quellcode | ||
* Verfassen des HSHL-Wiki-Artikels | * Verfassen des HSHL-Wiki-Artikels | ||
* Optimierung | * Optimierung | ||
=== [[Benutzer:Thomas Datche|Thomas Datche]] === | |||
*Konstruktion des Roboters | |||
*Optimierung | |||
==Robos Maximus== | |||
===Image Film=== | |||
[https://youtu.be/9yC4Drxx9G0 Video zu Robos Maximus] | |||
===Design=== | |||
<gallery widths="500" heights="400" perrow="3"> | |||
bild maximus.PNG|Übersetzung der Fangvorrichtung | |||
sandy.jpg|Lego Designer | |||
bild maximus2.PNG|Der Brick | |||
</gallery> | |||
=== Software === | |||
* [http://bricxcc.sourceforge.net/ Bricxcc] (Programmierung ab dem dritten Praktikumstermin) | |||
* [https://education.lego.com/de-de/downloads/mindstorms-ev3/software LEGO MINDSTORMS EV3] (Programmierung bis zum dritten Praktikumstermin) | |||
* [https://www.lego.com/de-de/mindstorms/downloads/nxt-software-download LEGO MINDSTORMS NXT 2.0-Software] (Programmierung bis zum dritten Praktikumstermin) | |||
* [https://www.hitechnic.com/downloadnew.php?category=13 HiTechnic Add-Ons] (Erweiterungen für HiTechnic Produkte in NXT 2.0) | |||
[ | |||
* [https://www.lego.com/en-us/ldd LEGO Digital Designer](Erstellung der Bauanleitung) | |||
* [https://www.heise.de/download/product/papdesigner-51889 PAP Designer] (Erstellung des Programmablaufplans nach DIN 66001) | |||
===Hardware=== | |||
== | ==== Bauanleitung ==== | ||
* [https://svn.hshl.de/usvn/project/Informatikpraktikum_1/show/trunk/Gruppen/Gruppen_WS1819/A3/Projektunterlagen/Bauanleitung%20Lego%20Digital%20Designer.pdf Bauanleitung Lego Digital Designer] (Anleitung als PDF im SVN) | |||
=== | ====Sensoren==== | ||
*'''Infrarotsensor''' | *'''Infrarotsensor''' | ||
[[Datei:IR | [[Datei:IR Sucher.jpg|200px|thumb|right|Infrarot Sensor <ref> Eigenes Foto </ref>]] | ||
Für die Erkennung des Balles, der ein Infrarotsignal aussendet, wurde | Für die Erkennung des Balles, der ein Infrarotsignal aussendet, wurde der Infrarot- Detektor von [https://modernroboticsinc.com/hitechnic-nxt-irseeker-v2/ HiTechnic] verbaut. Dieser Sensor ist in der Lage Infrarotsignale über fünf Detektoren in einem Winkel von 135° aufzunehmen und zeigt im welchen Bereich seines FOV (field of view) von 0 bis 9 sich der Ball befindet. | ||
Mit dem Modulierten Modus (AC Mode) kann moduliertes Infrarotlicht erkannt werden, dies sind künstlich erzeugte Infrarotsignale, z.B. auch Fernbedienungen und unter anderem auch der IR Ball aussendet. | Mit dem Modulierten Modus (AC Mode) kann moduliertes Infrarotlicht erkannt werden, dies sind künstlich erzeugte Infrarotsignale, z.B. auch Fernbedienungen und unter anderem auch der IR Ball aussendet. | ||
| Zeile 83: | Zeile 97: | ||
Der Tastsensor ist der einfachste NXT Baustein, denn dieser reagiert nur auf Druck und kann somit nur zwei Werte zurückliefern, 0 (nicht gedrückt) oder 1 (gedrückt). Der Taster wird mit einer Feder geöffnet. | Der Tastsensor ist der einfachste NXT Baustein, denn dieser reagiert nur auf Druck und kann somit nur zwei Werte zurückliefern, 0 (nicht gedrückt) oder 1 (gedrückt). Der Taster wird mit einer Feder geöffnet. | ||
Maximus verwendet zwei dieser Tastsensoren, um zu überprüfen ob der Ball gefangen wurde und um bei Kolision mit einem Hindernis eine Rückwärtsfahrt zu initiieren | |||
| Zeile 103: | Zeile 116: | ||
*'''Kompasssensor''' | *'''Kompasssensor''' | ||
[[Datei: | [[Datei:KompassMax.PNG|220px|thumb|right| Kompasssensor <ref> Eigenes Foto </ref>]] | ||
Der digitale Kompasssensor von [https://modernroboticsinc.com/hitechnic-nxt-compass-sensor/ HiTechnic] ist in der Lage das Erdmagnetfeld zu vermessen und somit kann eine genaue Positionsbestimmung und Navigation durchgeführt werden. Demnach entsprechen 0° Nord, 90° Ost, 180° Süd und 270° West. Auf dem Roboter kann man sich dabei die Werte von 0°- 359° ausgegeben lassen, für eine genaue Messung muss der Roboter sich langsam drehen. Dabei ist aber auch zu beachten, dass der Sensor nicht durch andere externe Magnetfelder beeinflusst wird, da dies zu Fehlermessungen führen kann. Aufgrund dessen sollte der Kompasssensor zur Navigierung eine Entfernung von ungefähr 15cm zu den Motoren haben. | Der digitale Kompasssensor von [https://modernroboticsinc.com/hitechnic-nxt-compass-sensor/ HiTechnic] ist in der Lage das Erdmagnetfeld zu vermessen und somit kann eine genaue Positionsbestimmung und Navigation durchgeführt werden. Demnach entsprechen 0° Nord, 90° Ost, 180° Süd und 270° West. Auf dem Roboter kann man sich dabei die Werte von 0°- 359° ausgegeben lassen, für eine genaue Messung muss der Roboter sich langsam drehen. Dabei ist aber auch zu beachten, dass der Sensor nicht durch andere externe Magnetfelder beeinflusst wird, da dies zu Fehlermessungen führen kann. Aufgrund dessen sollte der Kompasssensor zur Navigierung eine Entfernung von ungefähr 15cm zu den Motoren haben. | ||
| Zeile 115: | Zeile 128: | ||
| Zeile 121: | Zeile 133: | ||
====Aktoren==== | |||
*'''Motoren''' | *'''Motoren''' | ||
[[Datei: | [[Datei:MotorMax.PNG|200px|thumb|right| Antriebsmotor <ref> Eigenes Foto </ref>]] | ||
Die Motoren, die bei Lego Mindstorms verbaut werden, sind Servomotoren. Außerdem sind sie mit einem Drehsensor ausgestattet, der eine Genauigkeit von 1° hat und somit sich die Motoren sehr präzise anfahren lassen. Es werden drei Motoren bei dem NXT- Roboter verbaut, zwei Fahrmotoren und ein Motor für den Schuss- bzw. Fangarm. | Die Motoren, die bei Lego Mindstorms verbaut werden, sind Servomotoren. Außerdem sind sie mit einem Drehsensor ausgestattet, der eine Genauigkeit von 1° hat und somit sich die Motoren sehr präzise anfahren lassen. Es werden drei Motoren bei dem NXT- Roboter verbaut, zwei Fahrmotoren und ein Motor für den Schuss- bzw. Fangarm. | ||
== | == Spielstrategie == | ||
===Programmablaufplan=== | |||
<gallery widths="500" heights="400" perrow="3"> | |||
pap.PNG|PAP Hauptprogramm | |||
ball.PNG|Unterprogramm Ballsuche | |||
torschuss.PNG|Unterprogramm Ausrichtung | |||
</gallery> | |||
=== Quellcode === | |||
<gallery widths="500" heights="400" perrow="3" caption="Tasks"> | |||
BallsucheQC.JPG|Ballsuche | |||
Ausrichtung TorschussQC.JPG|Ausrichtung Torschuss | |||
Task Main.JPG|Task Main | |||
</gallery> | |||
==Zusammenfassung== | |||
===Lernziele=== | |||
Das Praktikum ermöglicht dem studierenden spielerisch und praxisorientiert einen ersten Einblick in die Programmiersprache C, am Bespiel des Lego Mindstorms NXT. Zunächst wurde jedoch in unterschiedlichen Softwareanwedungen das grafische programmieren trainiert. | |||
Ziel jedes Praktikumstermins war es, durch das Zusammenspiel von Planung, Konstruktion und Umsetzung der Mechanischen, sowie programmiertechnischen Aufgaben am Ende ein funktionales Programm auf dem Roboter präsentieren zu können. | |||
Zusammenfassend hat man die Grundlagen grafischer Programmierung erlernt und das Wissen anschließend in der Programmiersprache NXC (not quite C) vertieft. | |||
Zusätzlich wurde der Umgang mit der Versionsverwaltungssoftware SVN erlernt, welche das arbeiten im Team unterstützt hat. | |||
Die abschließende Ergebnispräsentation und -demonstration dient der sach- und inhaltsgerechten Darstellung der entwickelten Lösung. Zusätzlich stärkt eine solche Aufgabenstellung die Kommunikation im Team und die Selbstkompetenz, Aufgaben zu lösen, die vorher auf das Team aufgeteilt wurden. | |||
===Ausblick=== | |||
'''Verbesserungsmöglichkeiten:''' | |||
* Odometrietracking, um zu verhindern das der Roboter parallel zur Spielfeldausrichtung am Tor vorbei schießt. | |||
* Verbesserte Kollisionsabfrage, um Kolissionen von nicht ebenen Oberflächen genauer zu erkennen. | |||
* Tracking der Umdrehungszahl der Ballfangautomatik, um ein festhaken am Spielfeldrand zu verhindern. | |||
== | |||
''' | |||
==Literaturverzeichnis== | ==Literaturverzeichnis== | ||
| Zeile 175: | Zeile 182: | ||
---- | |||
→ zurück zum Hauptartikel: [[RoboSoccer_WS_18/19|Informatikpraktikum WS 18/19]] | → zurück zum Hauptartikel: [[RoboSoccer_WS_18/19|Informatikpraktikum WS 18/19]] | ||
Aktuelle Version vom 21. Januar 2022, 20:52 Uhr
Autoren: Florian Leben , Robin Grimm und Thomas Datche
Dozent: Prof. Dr. U. Schneider

Einleitung
Ein wesentlicher Bestandteil des Informatik Moduls bestand aus dem Informatikpraktikum 1, in welchem wir ausgehend von einer konkreten Problemfeldbeschreibung, aus einem Lego NXT Bausatz einen Roboter konstruieren und programmieren mussten. Um die gestellte Aufgabenstellung selbständig zu erfüllen, mussten die Auswahl der Sensoren, Aktoren und deren Programmierung durch sinvolles Zeit-/ und Projektmanagement geprägt sein.
Jeder Roboter wurde in 2-3er Gruppen von Studenten entwickelt, mit dem Ziel ein RoboSoccer Turnier zu gewinnen, welches am letzten Praktikumstermin stattgefunden hat.
- Regelwerk
- RoboSoccer-Turnier
Gruppenmitglieder und ihre Aufgaben
Florian Leben
- Konstruktion des Roboters
- Entwicklung der Spielstrategie mithilfe des PAP-Designers
- Umsetzung der Spielstrategie in Quellcode
- Entwurf des Werbeplakats
- Nachbildung des Roboters im Lego Digital Designer
- Erstellung des Videos
Robin Grimm
- Konstruktion des Roboters
- Entwicklung der Spielstrategie mithilfe des PAP-Designers
- Umsetzung der Spielstrategie in Quellcode
- Verfassen des HSHL-Wiki-Artikels
- Optimierung
Thomas Datche
- Konstruktion des Roboters
- Optimierung
Robos Maximus
Image Film
Design
-
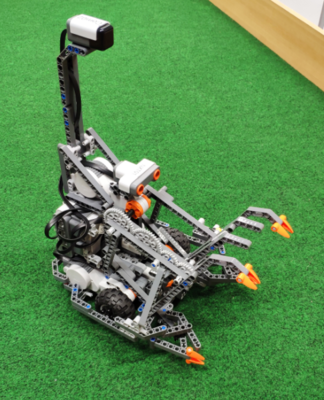 Übersetzung der Fangvorrichtung
Übersetzung der Fangvorrichtung -
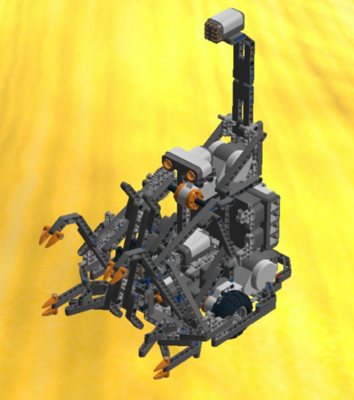 Lego Designer
Lego Designer -
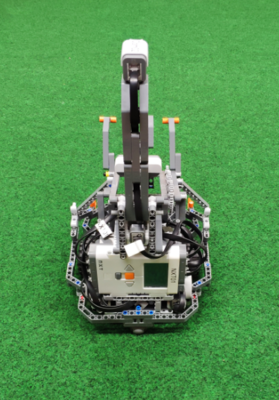 Der Brick
Der Brick



Software
- Bricxcc (Programmierung ab dem dritten Praktikumstermin)
- LEGO MINDSTORMS EV3 (Programmierung bis zum dritten Praktikumstermin)
- LEGO MINDSTORMS NXT 2.0-Software (Programmierung bis zum dritten Praktikumstermin)
- HiTechnic Add-Ons (Erweiterungen für HiTechnic Produkte in NXT 2.0)
- LEGO Digital Designer(Erstellung der Bauanleitung)
- PAP Designer (Erstellung des Programmablaufplans nach DIN 66001)
Hardware
Bauanleitung
- Bauanleitung Lego Digital Designer (Anleitung als PDF im SVN)
Sensoren
- Infrarotsensor

Für die Erkennung des Balles, der ein Infrarotsignal aussendet, wurde der Infrarot- Detektor von HiTechnic verbaut. Dieser Sensor ist in der Lage Infrarotsignale über fünf Detektoren in einem Winkel von 135° aufzunehmen und zeigt im welchen Bereich seines FOV (field of view) von 0 bis 9 sich der Ball befindet. Mit dem Modulierten Modus (AC Mode) kann moduliertes Infrarotlicht erkannt werden, dies sind künstlich erzeugte Infrarotsignale, z.B. auch Fernbedienungen und unter anderem auch der IR Ball aussendet.

- Tastsensor

Der Tastsensor ist der einfachste NXT Baustein, denn dieser reagiert nur auf Druck und kann somit nur zwei Werte zurückliefern, 0 (nicht gedrückt) oder 1 (gedrückt). Der Taster wird mit einer Feder geöffnet. Maximus verwendet zwei dieser Tastsensoren, um zu überprüfen ob der Ball gefangen wurde und um bei Kolision mit einem Hindernis eine Rückwärtsfahrt zu initiieren
- Kompasssensor

Der digitale Kompasssensor von HiTechnic ist in der Lage das Erdmagnetfeld zu vermessen und somit kann eine genaue Positionsbestimmung und Navigation durchgeführt werden. Demnach entsprechen 0° Nord, 90° Ost, 180° Süd und 270° West. Auf dem Roboter kann man sich dabei die Werte von 0°- 359° ausgegeben lassen, für eine genaue Messung muss der Roboter sich langsam drehen. Dabei ist aber auch zu beachten, dass der Sensor nicht durch andere externe Magnetfelder beeinflusst wird, da dies zu Fehlermessungen führen kann. Aufgrund dessen sollte der Kompasssensor zur Navigierung eine Entfernung von ungefähr 15cm zu den Motoren haben.
Aktoren
- Motoren

Die Motoren, die bei Lego Mindstorms verbaut werden, sind Servomotoren. Außerdem sind sie mit einem Drehsensor ausgestattet, der eine Genauigkeit von 1° hat und somit sich die Motoren sehr präzise anfahren lassen. Es werden drei Motoren bei dem NXT- Roboter verbaut, zwei Fahrmotoren und ein Motor für den Schuss- bzw. Fangarm.
Spielstrategie
Programmablaufplan
-
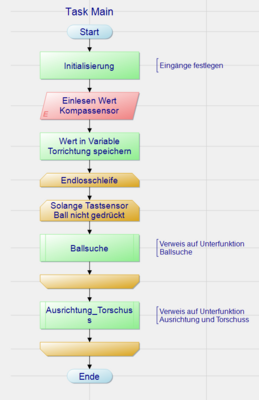 PAP Hauptprogramm
PAP Hauptprogramm -
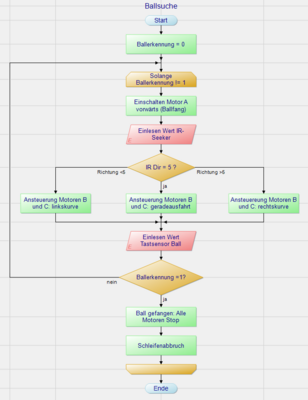 Unterprogramm Ballsuche
Unterprogramm Ballsuche -
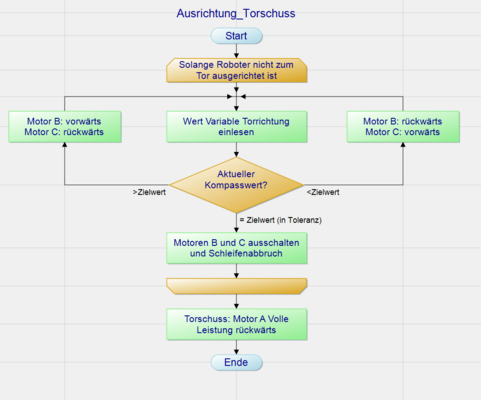 Unterprogramm Ausrichtung
Unterprogramm Ausrichtung



Quellcode
- Tasks
-
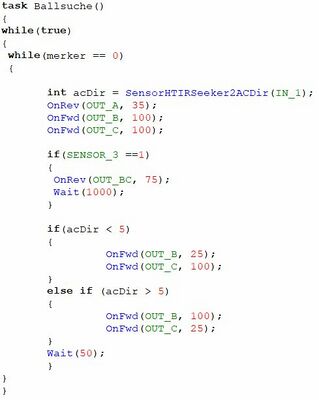 Ballsuche
Ballsuche -
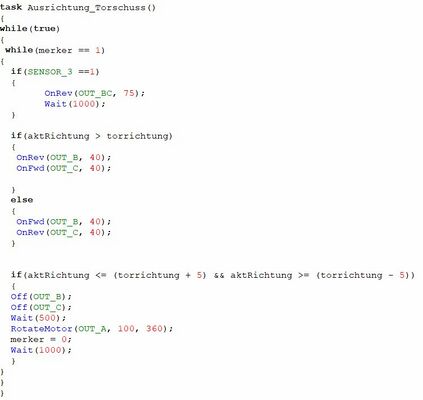 Ausrichtung Torschuss
Ausrichtung Torschuss -
 Task Main
Task Main



Zusammenfassung
Lernziele
Das Praktikum ermöglicht dem studierenden spielerisch und praxisorientiert einen ersten Einblick in die Programmiersprache C, am Bespiel des Lego Mindstorms NXT. Zunächst wurde jedoch in unterschiedlichen Softwareanwedungen das grafische programmieren trainiert. Ziel jedes Praktikumstermins war es, durch das Zusammenspiel von Planung, Konstruktion und Umsetzung der Mechanischen, sowie programmiertechnischen Aufgaben am Ende ein funktionales Programm auf dem Roboter präsentieren zu können.
Zusammenfassend hat man die Grundlagen grafischer Programmierung erlernt und das Wissen anschließend in der Programmiersprache NXC (not quite C) vertieft. Zusätzlich wurde der Umgang mit der Versionsverwaltungssoftware SVN erlernt, welche das arbeiten im Team unterstützt hat. Die abschließende Ergebnispräsentation und -demonstration dient der sach- und inhaltsgerechten Darstellung der entwickelten Lösung. Zusätzlich stärkt eine solche Aufgabenstellung die Kommunikation im Team und die Selbstkompetenz, Aufgaben zu lösen, die vorher auf das Team aufgeteilt wurden.
Ausblick
Verbesserungsmöglichkeiten:
- Odometrietracking, um zu verhindern das der Roboter parallel zur Spielfeldausrichtung am Tor vorbei schießt.
- Verbesserte Kollisionsabfrage, um Kolissionen von nicht ebenen Oberflächen genauer zu erkennen.
- Tracking der Umdrehungszahl der Ballfangautomatik, um ein festhaken am Spielfeldrand zu verhindern.
Literaturverzeichnis
- ↑ Eigenes Foto
- ↑ Eigenes Foto
- ↑ https://modernroboticsinc.com/hitechnic-nxt-irseeker-v2
- ↑ https://www.generationrobots.com/de/401223-tastsensor-fur-programmierbare-lego-mindstorms-nxt-roboter.html
- ↑ Eigenes Foto
- ↑ Eigenes Foto
→ zurück zum Hauptartikel: Informatikpraktikum WS 18/19