AMR 2013: Unterschied zwischen den Versionen
| (51 dazwischenliegende Versionen von einem anderen Benutzer werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
[[Kategorie:AMR]] | |||
Dieses Artikel befasst sich mit dem Aufbau des '''a'''utonomen '''m'''obilen '''R'''oboters '''AMR 2013''' an der HSHL. | Dieses Artikel befasst sich mit dem Aufbau des '''a'''utonomen '''m'''obilen '''R'''oboters '''AMR 2013''' an der HSHL. | ||
| Zeile 66: | Zeile 67: | ||
|} | |} | ||
Bei etwa der maximalen Geschwindigkeit ergeben sich Motorphasen der Periodendauer von ca. 10,2ms. Die Mindestzeit zwischen zwei Flanker der Hall-Phasen beträgt dabei ca. 1,5ms. | Bei etwa der maximalen Geschwindigkeit ergeben sich Motorphasen der Periodendauer von ca. 10,2ms. Die Mindestzeit zwischen zwei Flanker der Hall-Phasen beträgt dabei ca. 1,5ms. | ||
<gallery> | <gallery> | ||
Datei:Hallsensor Vorwärts vollgas.png|Hall-Signale des Motors bei maximaler Geschwindigkeit | Datei:Hallsensor Vorwärts vollgas.png|Hall-Signale des Motors bei maximaler Geschwindigkeit | ||
</gallery> | |||
==== Anschluss an Adapterplatine ==== | |||
Die Hall-Signale vom Motor werden an J4 wie folgt an der Adapterplatine angeschlossen: | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Anschluss auf | |||
Adapterplatine J4 | |||
! style="font-weight: bold;" | Anschluss auf DS1104 | |||
|- | |||
| Nicht verbunden | |||
| 1 | |||
| Nicht verbunden | |||
|- | |||
| Hall A | |||
| 2 | |||
| IO6 | |||
|- | |||
| Hall B | |||
| 3 | |||
| IO7 | |||
|- | |||
| Hall C | |||
| 4 | |||
| IO8 | |||
|- | |||
| GND | |||
| 5 | |||
| GND | |||
|} | |||
Des Weiteren werden die Hall-Signale über eine XOR-Kombinationslogik bearbeitet und zur Geschwindigkeitsermittlung genutzt. Weitere Informationen dazu sind verfügbar unter: [[Signalverarbeitung]] und [[Geschwindigkeitsermittlung]]. | |||
Damit die Hall-Signale auch von Kombinationslogik erfasst werden können, müssen diese auf der Adapterplatine über Jumper zu Kombinationschip weitergeleitet werden. Auf dem Wannenstecker J18 müssen jeweils die gegenüberliegenden Pins miteinander verbunden werden. Also 1 mit 2, 3 mit 4 und 5 mit 6. Analog dazu muss der Ausgang der Kombinationslogik mit der DS1104-Karte verbunden werden. Dazu müssen auf Wannenstecker J19 Pin 1 mit 2 und Pin 3 mit 4 verbunden werden. | |||
Die Hall-Signale sowie das kombinierte Signal sind wie folgt auf der DS1104 verfügbar: | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Anschluss auf DS1104 | |||
|- | |||
| Hall A | |||
| IO6 | |||
|- | |||
| Hall B | |||
| IO7 | |||
|- | |||
| Hall C | |||
| IO8 | |||
|- | |||
| Kombi-Hall-Signal | |||
| IO19 | |||
|- | |||
| Invertiertes Kombi-Hall-Signal | |||
| IO17 | |||
|} | |||
<gallery> | |||
Datei:AMR13 Hall-Eingang.png|Anschluss der Hall-Signale an der Adapterplatine | |||
Datei:AMR13 Hall-Jumper.png|Jumper zur Weiterleitung der Hall-Signale zur Kombinationslogik | |||
Datei:AMR13 XOR-Jumper.png|Jumper zur Weiterleitung der kombinierten Hall-Signale zu DS1104 | |||
</gallery> | </gallery> | ||
| Zeile 182: | Zeile 245: | ||
</gallery> | </gallery> | ||
=== Fahrtenregler === | ==== Anschluss des Empfängermoduls an Adapterplatine ==== | ||
Die Fahr- und Lenksignale der Fernbedienung werden an der Adapterplatine auf Stecker J9 angeschlossen, der wie folgt belegt ist: | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pin auf J9 | |||
! style="font-weight: bold;" | Anschluss auf DS1104 | |||
|- | |||
| Nicht verbunden | |||
| 1 | |||
| | |||
|- | |||
| Lenksignal der Fernbedienung | |||
| 2 | |||
| SCAP1 | |||
|- | |||
| Fahrsignal der Fernbedienung | |||
| 3 | |||
| SCAP2 | |||
|- | |||
| Vcc | |||
| 4 | |||
| | |||
|- | |||
| GND | |||
| 5 | |||
| | |||
|} | |||
<gallery> | |||
Datei:AMR13 RC-In.png|Anschluss des Empfangsmodul an Adapterplatine | |||
</gallery> | |||
=== Fahrtenregler und Lenkservo === | |||
==== Fahrtenregler ==== | |||
Der Fahrtenregler hat folgende Eingangsverkabelung: | |||
{| class="wikitable" | {| class="wikitable" | ||
! Pin !! colspan="2" | Farbe !! Funktion | ! Pin !! colspan="2" | Farbe !! Funktion | ||
| Zeile 202: | Zeile 300: | ||
|} | |} | ||
=== | ==== Lenkservo ==== | ||
Der Lenkservo hat folgende Eingangsverkabelung: | |||
{| class="wikitable" | {| class="wikitable" | ||
! Pin !! colspan="2" | Farbe !! Funktion | ! Pin !! colspan="2" | Farbe !! Funktion | ||
| Zeile 222: | Zeile 321: | ||
|} | |} | ||
=== | |||
Die Steuersignale für Fahrtenregler und Servo aus der DS1104 sind auf Stecker J10 zu finden. Der Stecker hat folgende Belegung: | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pin auf J9 | |||
! style="font-weight: bold;" | Anschluss auf DS1104 | |||
|- | |||
| Nicht verbunden | |||
| 1 | |||
| | |||
|- | |||
| PWM-Ausgang des Lenksignals | |||
| 2 | |||
| ST2PWM | |||
|- | |||
| PWM-Ausgang des Fahrsignals | |||
| 3 | |||
| SPWM7 | |||
|- | |||
| Vcc bei Geschlossenen Jumper auf J21 | |||
| 4 | |||
| | |||
|- | |||
| GND | |||
| 5 | |||
| | |||
|} | |||
Es besteht auch die Möglichkeit, Den Fahrtenregler und Servo an Vcc der Adapterplatine anzuschliessen. Dazu müssen beide Pins des Steckers J21 miteinander über ein Jumper angeschlossen werden. | |||
<gallery> | |||
Datei:AMR13 RC-Out.png|Anschluss zu Ansteuerung des Fahrtenreglers und Servo | |||
Datei:RC-Out-Vcc-Jumper.png|Jumper zu Weiterleitung von Vcc zu Pin 4 von Stecker J10 | |||
</gallery> | |||
=== Verkabelung === | === Verkabelung === | ||
<gallery> | |||
Datei:AMR13 Blockdiagramm Fahrgestell.png|Blockdiagramm der Komponenten und Verkabelung im Fahrgestell | |||
</gallery> | |||
== Karosserie == | == Karosserie == | ||
=== Adapterplatine === | === Adapterplatine === | ||
Versorgt wird die Adapterplatine aus dem Powerpanel mit 5V über den Stecker J1 | |||
<gallery> | |||
Bild:AMR13 Adapterplatine.png|Skizze der Adapterplatine | |||
Bild:AMR13 Adapterplatine Anschluesse.png|Anschlüsse der Adapterplatine | |||
Datei:AMR13 Adapterplatine Versorgung.png|Stecker J1 zur Spannungsversorgung der Adapterplatine mit 5V | |||
</gallery> | |||
Auch verfügt die Adapterplatine über 2 Anschlüsse zur Spannungsmessung der Akkus. PC-Akkus können an J27 angeschlossen werden und Fahr-Akku an J26. Über Analogeingang der DS1104 können die Spannungen an der Akkus gemessen werden. | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pinnummer auf Stecker J26 | |||
! style="font-weight: bold;" | Anschluss an DS1104 | |||
|- | |||
| GND | |||
| 1 | |||
| | |||
|- | |||
| Spannungseingang Fahrakku | |||
| 2 | |||
| ADCH2 | |||
|} | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pinnummer auf Stecker J26 | |||
! style="font-weight: bold;" | Anschluss an DS1104 | |||
|- | |||
| GND | |||
| 1 | |||
| | |||
|- | |||
| Spannungseingang PC-Akku 1 | |||
| 2 | |||
| ADCH3 | |||
|- | |||
| Spannungseingang PC-Akku 2 | |||
| 3 | |||
| ADCH1 | |||
|} | |||
<gallery> | |||
Datei:AMR13 Spannungseingang Fahr Akku.png| Stecker zur Messung der Spannung am Fahrakku | |||
Datei:AMR13 Spannungseingang PC Akku.png| Stecker zur Messung der Spannungen an PC-Akkus | |||
</gallery> | |||
==== Anschlüsse an der Adapterplatine ==== | ==== Anschlüsse an der Adapterplatine ==== | ||
NC: Not Connected, Pin nicht angeschlossen bzw. ohne Funktion. | NC: Not Connected, Pin nicht angeschlossen bzw. ohne Funktion. | ||
| Zeile 565: | Zeile 750: | ||
| | | | ||
|- | |- | ||
| rowspan=" | | rowspan="6" | J20 | ||
| rowspan="2 | | rowspan="6" | Steuerung der Lichter | ||
| 1 | |||
| GND | |||
| | |||
|- | |||
| 2 | |||
| Blinker Links | |||
| | |||
|- | |||
| 3 | |||
| Blinker Rechts | |||
| | |||
|- | |||
| 4 | |||
| Bremslicht | |||
| | |||
|- | |||
| 5 | |||
| Rückfahrlicht | |||
| | |||
|- | |||
| 6 | |||
| Fahrlicht | |||
| | |||
|- | |||
| J21 | |||
| Jumper zur Durchleitung von Vcc zu Fahrtenregler | |||
| 1 | | 1 | ||
| Pin 4 auf J10 | | Pin 4 auf J10 | ||
| | | | ||
|- | |- | ||
| | |||
| | |||
| 2 | | 2 | ||
| Vcc | | Vcc | ||
| Zeile 601: | Zeile 814: | ||
| 3 | | 3 | ||
| 4x X | | 4x X | ||
| | |||
|- | |||
| J24 | |||
| | |||
| | |||
| | |||
| | |||
|- | |||
| J25 | |||
| | |||
| | |||
| | |||
| | | | ||
|- | |- | ||
| Zeile 628: | Zeile 853: | ||
|} | |} | ||
==== Gyrosensor ==== | === Gyrosensor === | ||
Im AMR 2013 wird der Gyroskop LPR510AL eingesetzt. Informationen zum Gyrosensor können [[Gyrosensor (LPR510AL)| hier gelesen werden.]] | |||
Per Jumper können 3 Einstellungen vorgenommen werden: | |||
* X-Signal wird einfach oder vierfach verstärkt. | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pins auf J23 kurzschließen | |||
|- | |||
| X-Signal einfach verstärkt | |||
| 1 und 2 | |||
|- | |||
| X-Signal vierfach verstärkt | |||
| 2 und 3 | |||
|} | |||
* Z-Signal wird einfach oder vierfach verstärkt. | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pins auf J22 kurzschließen | |||
|- | |||
| Z-Signal einfach verstärkt | |||
| 1 und 2 | |||
|- | |||
| Z-Signal vierfach verstärkt | |||
| 2 und 3 | |||
|} | |||
* X- oder Z-Signal werden an DS1104 weitergeleitet. | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pins auf J17 kurzschließen | |||
|- | |||
| Z-Signal an DS1104 weiterleiten | |||
| 1 und 2 | |||
|- | |||
| X-Signal an DS1104 weiterleiten | |||
| 2 und 3 | |||
|} | |||
<gallery> | |||
Datei:AMR13 Gyrosignal Auswahl X Z.png|Jumper zur Auswahl des Gyrosignals X und Z | |||
Datei:AMR13 Gyrosignal Verstaerkung Z.png|Jumper zu Auswahl der Verstärkung des Z-Signals des Gyrosensors 1- oder 4-Fach | |||
Datei:AMR13 Gyrosignal Verstaerkung X.png|Jumper zu Auswahl der Verstärkung des X-Signals des Gyrosensors 1- oder 4-Fach | |||
</gallery> | |||
=== Rechner === | === Rechner === | ||
==== dSPACE DS1104 RCP ==== | ==== dSPACE DS1104 RCP ==== | ||
=== Kamera === | === Kamera === | ||
[https://www.vrmagic.com/de/imaging/kameraplattformen/d2-intelligente-plattform/ VRmagic D2 OEM-Version] | |||
Spannungsversorgung mit Vcc=5V von der Adapterplatine (J2) und Anschluss an dem Rechner über die Ethernet-Schnittstelle | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pins auf J2 | |||
|- | |||
| 5V-Versorgung der Kamera | |||
| 1 | |||
|- | |||
| GND | |||
| 2 | |||
|} | |||
<gallery> | |||
Datei:AMR13 Kamera 5V.png|Stecker zur Spannungsversorgung der Kamera | |||
</gallery> | |||
=== LIDAR === | === LIDAR === | ||
=== Ultraschallsensoren === | |||
Vorgesehen sind 2 Ultraschallsensoren zur Distanzmessung zu Hindernissen vor dem Fahrzeug. Diese werden an Stecker J7 und J8 angeschlossen. | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Sensorposition | |||
! style="font-weight: bold;" | Sensornummer | |||
! style="font-weight: bold;" | Anschluss auf Adapterplatine | |||
|- | |||
| Vorne Links | |||
| 1 | |||
| J7 | |||
|- | |||
| Vorne Rechts | |||
| 2 | |||
| J8 | |||
|} | |||
Der Sensor 1 ist wie folgt verdrahtet: | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pinnummer auf Stecker J7 | |||
! style="font-weight: bold;" | Anschluss an DS1104 | |||
|- | |||
| GND | |||
| 1 | |||
| | |||
|- | |||
| Triggersignal | |||
| 2 | |||
| SPWM1 | |||
|- | |||
| Triggersignal | |||
| 3 | |||
| SPWM1 | |||
|- | |||
| Echosignal | |||
| 4 | |||
| SCAP3 | |||
|- | |||
| Vcc | |||
| 5 | |||
| | |||
|} | |||
Der Sensor 2 ist wie folgt verdrahtet: | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pinnummer auf Stecker J8 | |||
! style="font-weight: bold;" | Anschluss an DS1104 | |||
|- | |||
| GND | |||
| 1 | |||
| | |||
|- | |||
| Nicht verbunden | |||
| 2 | |||
| | |||
|- | |||
| Triggersignal | |||
| 3 | |||
| SPWM2 | |||
|- | |||
| Echosignal | |||
| 4 | |||
| SCAP4 | |||
|- | |||
| Vcc | |||
| 5 | |||
| | |||
|} | |||
<gallery> | |||
Datei:AMR13 Ultraschall.png|Stecker für die Ultraschallsensoren | |||
</gallery> | |||
=== IR-Sensoren === | === IR-Sensoren === | ||
Es sind 4 Infrarotsensoren zur Abstandsmessung am Fahrzeug angebracht. Weitere Information zum Sensor können [[Fahrzeughardware#Infrarot_Sensor|hier]] entnommen werden. | |||
Die Sensoren werden wie folgt angeschlossen: | |||
{| class="wikitable" | |||
! style="text-align: center; font-weight: bold;" | Sensorposition | |||
! style="font-weight: bold;" | Sensornummer | |||
! style="text-align: center; font-weight: bold;" | Anschluss auf | |||
Adapterplatine | |||
! style="text-align: center; font-weight: bold;" | Anschluss auf | |||
DS1104 | |||
|- | |||
| Hinten Rechts | |||
| 3 | |||
| J5 | |||
| ADCH7 | |||
|- | |||
| Seite Hinten | |||
| 2 | |||
| J6 | |||
| ADCH6 | |||
|- | |||
| Hinten Links | |||
| 4 | |||
| J12 | |||
| ADCH8 | |||
|- | |||
| Seite Vorne | |||
| 1 | |||
| J14 | |||
| ADCH5 | |||
|} | |||
Dabei haben alle Sensoren folgende Verdrahtung: | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pinnummer | |||
|- | |||
| Vcc | |||
| 1 | |||
|- | |||
| GND | |||
| 2 | |||
|- | |||
| Analogausgang des Sensors | |||
| 3 | |||
|} | |||
<gallery> | |||
Bild:SkizzeFahrzeugInfrarot.JPG|Skizze Sensorpositionen Infrarotsensoren | |||
Bild:AMR13 IR-Sensoren Adapterplatine.png|Anschlüsse der Infrarotsensoren auf der Adapterplatine | |||
</gallery> | |||
=== Lichter === | === Lichter === | ||
==== Anschlussplatine der | |||
==== Fahrzeugbeleuchtung ==== | |||
<gallery> | |||
Bild:AMR13 Lichter.png|Anscluss der Lichter an Adapterplatine | |||
</gallery> | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Anschluss auf | |||
Adapterplatine J20 | |||
! style="font-weight: bold;" | Anschluss auf DS1104 | |||
|- | |||
| GND | |||
| 1 | |||
| GND | |||
|- | |||
| Blinker Links | |||
| 2 | |||
| IO9 | |||
|- | |||
| Blinker Rechts | |||
| 3 | |||
| IO5 | |||
|- | |||
| Bremse | |||
| 4 | |||
| IO1 | |||
|- | |||
| Rückfahrlicht | |||
| 5 | |||
| DACH8 | |||
|- | |||
| Fahrlicht | |||
| 6 | |||
| Vcc / immer an! | |||
|} | |||
===== Anschlussplatine der Beleuchtung ===== | |||
==== Eingriffsbeleuchtung / Blaue LED ==== | |||
Die blaue LED zu Signalisierung des Fernbedienungseingriff wird über Stecker J3 angeschlossen. | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pin auf J3 | |||
! style="font-weight: bold;" | Anschluss auf DS1104 | |||
|- | |||
| Vcc | |||
| 1 | |||
| | |||
|- | |||
| GND | |||
| 2 | |||
| | |||
|- | |||
| Steuersignal der Diode | |||
| 3 | |||
| IO15 | |||
|} | |||
<gallery> | |||
Datei:AMR13 Blaue LED.png| Anschluss der blauen LED an Adapterplatine | |||
</gallery> | |||
=== Powerpanel === | === Powerpanel === | ||
==== Taster ==== | |||
===== Programmtaster ===== | |||
Es sind 4 Programmtaster vorhanden. Damit können verschiedene Programmmodi geschaltet werden. Die Taster sind an der Adapterplatine an Stecker J13 angeschlossen. | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Funktion | |||
! style="font-weight: bold;" | Pin auf J3 | |||
! style="font-weight: bold;" | Anschluss auf DS1104 | |||
|- | |||
| GND | |||
| 1 | |||
| | |||
|- | |||
| Taster 1 | |||
| 2 | |||
| IO11 | |||
|- | |||
| Taster 2 | |||
| 3 | |||
| IO12 | |||
|- | |||
| Taster 3 | |||
| 4 | |||
| IO13 | |||
|- | |||
| Taster 4 | |||
| 5 | |||
| IO14 | |||
|} | |||
<gallery> | |||
Datei:AMR13 Taster.png|Anschluss der Taster an der Adapterplatine | |||
</gallery> | |||
==== Schaltung und Layout ==== | ==== Schaltung und Layout ==== | ||
==== Anschlüsse des Mikrocontrollers ==== | |||
Folgende Tabelle zeigt die Funktion der Anschlüsse des Mikrocontrollers auf der Steuerplatine | |||
{| class="wikitable" | |||
! style="font-weight: bold;" | Pin | |||
! style="font-weight: bold;" | Port/Name | |||
! style="font-weight: bold;" | Funktion | |||
|- | |||
| 1 | |||
| PB0 | |||
| PC_ON_SWITCH | |||
|- | |||
| 2 | |||
| PB1 | |||
| PC_ON_SIGNAL | |||
|- | |||
| 3 | |||
| PB2 | |||
| uC_PC_PWR_ENABLE | |||
|- | |||
| 4 | |||
| PB3 | |||
| Einschalten Bar-Anzeige 1 | |||
|- | |||
| 5 | |||
| PB4 | |||
| Einschalten Bar-Anzeige 2 | |||
|- | |||
| 6 | |||
| PB5 | |||
| Baranzeige LED0 | |||
|- | |||
| 7 | |||
| PB6 | |||
| Baranzeige LED1 | |||
|- | |||
| 8 | |||
| PB7 | |||
| Baranzeige LED2 | |||
|- | |||
| 9 | |||
| !RESET | |||
| | |||
|- | |||
| 10 | |||
| VCC | |||
| | |||
|- | |||
| 11 | |||
| GND | |||
| | |||
|- | |||
| 12 | |||
| | |||
| NC | |||
|- | |||
| 13 | |||
| | |||
| NC | |||
|- | |||
| 14 | |||
| PD0 | |||
| uC_ENABLE_PC_BAT | |||
|- | |||
| 15 | |||
| PD1 | |||
| uC_ENABLE_PC_EXTERNAL | |||
|- | |||
| 16 | |||
| PD2 | |||
| Baranzeige LED3 | |||
|- | |||
| 17 | |||
| PD3 | |||
| Baranzeige LED4 | |||
|- | |||
| 18 | |||
| PD4 | |||
| Baranzeige LED5 | |||
|- | |||
| 19 | |||
| PD5 | |||
| Reserviert für ein Buzzer | |||
|- | |||
| 20 | |||
| PD6 | |||
| Baranzeige LED6 | |||
|- | |||
| 21 | |||
| PD7 | |||
| Baranzeige LED7 | |||
|- | |||
| 22 | |||
| PC0 | |||
| Baranzeige LED8 | |||
|- | |||
| 23 | |||
| PC1 | |||
| Baranzeige LED9 | |||
|- | |||
| 24 | |||
| | |||
| | |||
|- | |||
| 25 | |||
| | |||
| | |||
|- | |||
| 26 | |||
| | |||
| | |||
|- | |||
| 27 | |||
| | |||
| | |||
|- | |||
| 28 | |||
| PC6 | |||
| BAT_CHECK_SWITCH | |||
|- | |||
| 29 | |||
| | |||
| | |||
|- | |||
| 30 | |||
| | |||
| | |||
|- | |||
| 31 | |||
| | |||
| | |||
|- | |||
| 32 | |||
| | |||
| | |||
|- | |||
| 33 | |||
| | |||
| | |||
|- | |||
| 34 | |||
| | |||
| | |||
|- | |||
| 35 | |||
| | |||
| | |||
|- | |||
| 36 | |||
| | |||
| | |||
|- | |||
| 37 | |||
| PA3 | |||
| Status-LED der externen Stromversorgung (Netzteil) | |||
|- | |||
| 38 | |||
| PA2/ADC2 | |||
| Spannungsmessung Fahr-Akku | |||
|- | |||
| 39 | |||
| PA1/ADC1 | |||
| Spannungsmessung externe Versorgung (Netzteil) | |||
|- | |||
| 40 | |||
| PA0/ADC0 | |||
| Spannungsmessung PC-Akku | |||
|} | |||
==== Aufladen der Akkus ==== | ==== Aufladen der Akkus ==== | ||
=== Verkabelung === | === Verkabelung === | ||
→ zurück zum Hauptartikel: [[Praktikum_SDE|Praktikum SDE]] | |||
Aktuelle Version vom 22. November 2023, 15:51 Uhr
Dieses Artikel befasst sich mit dem Aufbau des autonomen mobilen Roboters AMR 2013 an der HSHL.
Systemübersicht
Konstruktion
Fahrgestell
Aktuatorenschalter
Der Aktuatorenschalter schaltet den Fahrtenregler und Lenkservo aus, sodass keine Fahrt- und Lenkbewegung möglich ist.
| Stellung | Funktion |
|---|---|
| Links | |
| Mitte | |
| Rechts |
Motor
Anschlüsse
Der Motor verfügt über zwei Anschlüsse. Der erste Anschluss dient zur Steuerung der drei Phasen des Motors A, B und C seitens des Fahrtenregler. Da diese Leitungen hohe Ströme führen, ist äußerste Vorsicht bei der Umgang mit denen geboten. Der zweite Anschluss ist der Sensoranschluss. Hier überträgt der Motor der Stand der Phasen an dem Fahrtenregler weiter, um genaue Ansteuerung zu ermöglichen.
Hall-Sensor
Der Sensoranschluss des Motors wird in Form eines 6-poligen ZH-Buchse mit Rastermaß 1,5mm bereitgestellt. Die Signale sind wie folgend belegt:
-
 Hall-Sensor-Anschluss
Hall-Sensor-Anschluss

| Pin | Farbe | Funktion | |
|---|---|---|---|
| 1 | Schwarz | GND | |
| 2 | Orange | Phase A | |
| 3 | Weiß | Phase B | |
| 4 | Grün | Phase C | |
| 5 | Blau | NC | |
| 6 | Rot | NC | |
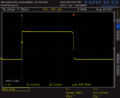
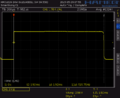
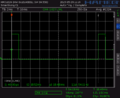
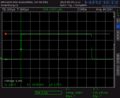
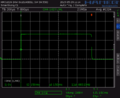
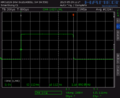
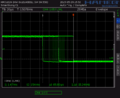
Bei etwa der maximalen Geschwindigkeit ergeben sich Motorphasen der Periodendauer von ca. 10,2ms. Die Mindestzeit zwischen zwei Flanker der Hall-Phasen beträgt dabei ca. 1,5ms.
-
 Hall-Signale des Motors bei maximaler Geschwindigkeit
Hall-Signale des Motors bei maximaler Geschwindigkeit

Anschluss an Adapterplatine
Die Hall-Signale vom Motor werden an J4 wie folgt an der Adapterplatine angeschlossen:
| Funktion | Anschluss auf
Adapterplatine J4 |
Anschluss auf DS1104 |
|---|---|---|
| Nicht verbunden | 1 | Nicht verbunden |
| Hall A | 2 | IO6 |
| Hall B | 3 | IO7 |
| Hall C | 4 | IO8 |
| GND | 5 | GND |
Des Weiteren werden die Hall-Signale über eine XOR-Kombinationslogik bearbeitet und zur Geschwindigkeitsermittlung genutzt. Weitere Informationen dazu sind verfügbar unter: Signalverarbeitung und Geschwindigkeitsermittlung.
Damit die Hall-Signale auch von Kombinationslogik erfasst werden können, müssen diese auf der Adapterplatine über Jumper zu Kombinationschip weitergeleitet werden. Auf dem Wannenstecker J18 müssen jeweils die gegenüberliegenden Pins miteinander verbunden werden. Also 1 mit 2, 3 mit 4 und 5 mit 6. Analog dazu muss der Ausgang der Kombinationslogik mit der DS1104-Karte verbunden werden. Dazu müssen auf Wannenstecker J19 Pin 1 mit 2 und Pin 3 mit 4 verbunden werden.
Die Hall-Signale sowie das kombinierte Signal sind wie folgt auf der DS1104 verfügbar:
| Funktion | Anschluss auf DS1104 |
|---|---|
| Hall A | IO6 |
| Hall B | IO7 |
| Hall C | IO8 |
| Kombi-Hall-Signal | IO19 |
| Invertiertes Kombi-Hall-Signal | IO17 |
-
 Anschluss der Hall-Signale an der Adapterplatine
Anschluss der Hall-Signale an der Adapterplatine -
 Jumper zur Weiterleitung der Hall-Signale zur Kombinationslogik
Jumper zur Weiterleitung der Hall-Signale zur Kombinationslogik -
 Jumper zur Weiterleitung der kombinierten Hall-Signale zu DS1104
Jumper zur Weiterleitung der kombinierten Hall-Signale zu DS1104



Empfängermodul
Diese Beschreibung beschränkt sich zunächst auf dem Fernbedienungsempfänger Futaba F143F 50MHz FM. Nichtsdestotrotz können die hier enthaltene Informationen auf andere Empfänger für die gleiche Anwendung übertragen werden.
Der Fernbedienungsempfänger empfängt die Radiosignale der Fernbedienung und gibt Steuersignale zum Lenkservo und Fahrtenregler ab.
Anschlüsse
Die Stromversorgung des Empfängers erfolgt über den Fahrtenregler, der wiederum die Versorgung von Fahrakku entnimmt. Gemessen ist ein Versorgungspegel von 6V.
Die Versorgung des Empfängers kann auch über den BAT- oder B/C-Anschluss erfolgen. Zu beachten ist, dass die Masse- und Versorgungsanschlüsse jeweils über alle Steckplätze kurzgeschlossen sind. An den Anschlüssen CH1 - CH3 können 3 Ausgänge angeschlossen werden. Hier werden der Fahrtenregler an CH1 und der Lenkservo an CH3 angeschlossen.
-
 Skizze des Fernbedienungs-empfängers Futaba F143F
Skizze des Fernbedienungs-empfängers Futaba F143F

Lenk-Signal
Das Lenksignal wird als PWM-Signal vom Empfänger an dem Lenkservo gegeben. Das Signal ist wie folgend beschaffen:
| Parameter | Wert |
|---|---|
| Amplitude | 3 V |
| Periodendauer | 18,50 ms |
| Frequenz | 54 Hz |
| Pulsweite Lenkung 0-Position | 1,52 ms |
| Tastgrad Lenkung 0-Position | 8,22% |
| Pulsweite Lenkung Rechts | 1,10 ms |
| Tastgrad Lenkung Rechts | 5,94% |
| Pulsweite Lenkung Links | 1,92 ms |
| Tastgrad Lenkung Links | 10,38% |
-
 Periodendauer des PWM-Lenksignals
Periodendauer des PWM-Lenksignals -
 Amplitudenmessung des PWM-Lenksignals
Amplitudenmessung des PWM-Lenksignals -
 Pulsweite bei Lenkwinkel = 0
Pulsweite bei Lenkwinkel = 0 -
 Pulsweite bei Rechtsauschlag
Pulsweite bei Rechtsauschlag -
 Pulsweite bei Linksauschlag
Pulsweite bei Linksauschlag





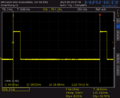
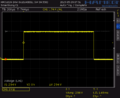
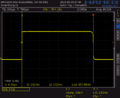
Gas-Signal
Ähnlich wie das Lenksignal wird das Gassignal in einem PWM-Signal moduliert. Das Signal hat folgende Eigenschaften:
| Parameter | Wert |
|---|---|
| Amplitude | 2,7 V |
| Periodendauer | 18,50 ms |
| Frequenz | 54 Hz |
| Pulsweite bei Pedal 0-Position | 1,50 ms |
| Tastgrad Pedal 0-Position | 8,11 % |
| Pulsweite Vollgas Vorwärts | 1,93 ms |
| Tastgrad Vollgas Vorwärts | 10,43 % |
| Pulsweite Vollgas Rückwärts | 1,11 ms |
| Tastgrad Vollgas Rückwärts | 6 % |
-
 Periodendauer des PWM-Gassignals
Periodendauer des PWM-Gassignals -
 Amplitudenmessung des PWM-Gassignals
Amplitudenmessung des PWM-Gassignals -
 Pulsweite bei Pedalstellung = 0
Pulsweite bei Pedalstellung = 0 -
 Pulsweite bei Vollgas in Vorwärtsrichtung
Pulsweite bei Vollgas in Vorwärtsrichtung -
 Pulsweite bei Vollgas in Rückwärtsrichtung
Pulsweite bei Vollgas in Rückwärtsrichtung





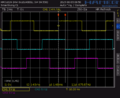
Signalschwankungen
Die oben dargestellten Pulsbreiten der Signale schwanken bei konstanter Betätigung der Fernbedienung um ca. 65µs.
-
 Schwankung der Pulsbreite der Fernbedienungssignale
Schwankung der Pulsbreite der Fernbedienungssignale

Anschluss des Empfängermoduls an Adapterplatine
Die Fahr- und Lenksignale der Fernbedienung werden an der Adapterplatine auf Stecker J9 angeschlossen, der wie folgt belegt ist:
| Funktion | Pin auf J9 | Anschluss auf DS1104 |
|---|---|---|
| Nicht verbunden | 1 | |
| Lenksignal der Fernbedienung | 2 | SCAP1 |
| Fahrsignal der Fernbedienung | 3 | SCAP2 |
| Vcc | 4 | |
| GND | 5 |
-
 Anschluss des Empfangsmodul an Adapterplatine
Anschluss des Empfangsmodul an Adapterplatine

Fahrtenregler und Lenkservo
Fahrtenregler
Der Fahrtenregler hat folgende Eingangsverkabelung:
| Pin | Farbe | Funktion | |
|---|---|---|---|
| 1 | Schwarz | GND | |
| 2 | Rot | Vcc | |
| 3 | Weiß | PWM-Eingang | |
Lenkservo
Der Lenkservo hat folgende Eingangsverkabelung:
| Pin | Farbe | Funktion | |
|---|---|---|---|
| 1 | Braun | GND | |
| 2 | Rot | Vcc | |
| 3 | Weiß | PWM-Eingang | |
Die Steuersignale für Fahrtenregler und Servo aus der DS1104 sind auf Stecker J10 zu finden. Der Stecker hat folgende Belegung:
| Funktion | Pin auf J9 | Anschluss auf DS1104 |
|---|---|---|
| Nicht verbunden | 1 | |
| PWM-Ausgang des Lenksignals | 2 | ST2PWM |
| PWM-Ausgang des Fahrsignals | 3 | SPWM7 |
| Vcc bei Geschlossenen Jumper auf J21 | 4 | |
| GND | 5 |
Es besteht auch die Möglichkeit, Den Fahrtenregler und Servo an Vcc der Adapterplatine anzuschliessen. Dazu müssen beide Pins des Steckers J21 miteinander über ein Jumper angeschlossen werden.
-
 Anschluss zu Ansteuerung des Fahrtenreglers und Servo
Anschluss zu Ansteuerung des Fahrtenreglers und Servo -
 Jumper zu Weiterleitung von Vcc zu Pin 4 von Stecker J10
Jumper zu Weiterleitung von Vcc zu Pin 4 von Stecker J10


Verkabelung
-
 Blockdiagramm der Komponenten und Verkabelung im Fahrgestell
Blockdiagramm der Komponenten und Verkabelung im Fahrgestell
Karosserie
Adapterplatine
Versorgt wird die Adapterplatine aus dem Powerpanel mit 5V über den Stecker J1
-
 Skizze der Adapterplatine
Skizze der Adapterplatine -
 Anschlüsse der Adapterplatine
Anschlüsse der Adapterplatine -
 Stecker J1 zur Spannungsversorgung der Adapterplatine mit 5V
Stecker J1 zur Spannungsversorgung der Adapterplatine mit 5V



Auch verfügt die Adapterplatine über 2 Anschlüsse zur Spannungsmessung der Akkus. PC-Akkus können an J27 angeschlossen werden und Fahr-Akku an J26. Über Analogeingang der DS1104 können die Spannungen an der Akkus gemessen werden.
| Funktion | Pinnummer auf Stecker J26 | Anschluss an DS1104 |
|---|---|---|
| GND | 1 | |
| Spannungseingang Fahrakku | 2 | ADCH2 |
| Funktion | Pinnummer auf Stecker J26 | Anschluss an DS1104 |
|---|---|---|
| GND | 1 | |
| Spannungseingang PC-Akku 1 | 2 | ADCH3 |
| Spannungseingang PC-Akku 2 | 3 | ADCH1 |
-
 Stecker zur Messung der Spannung am Fahrakku
Stecker zur Messung der Spannung am Fahrakku -
 Stecker zur Messung der Spannungen an PC-Akkus
Stecker zur Messung der Spannungen an PC-Akkus


Anschlüsse an der Adapterplatine
NC: Not Connected, Pin nicht angeschlossen bzw. ohne Funktion.
| Stecker auf Adapterplatine | Funktion | Pin Auf Stecker | Pin-Funktion | Pin auf dSPACE DS1104 |
|---|---|---|---|---|
| J1 | 5V DC | 1 | Vcc = 5V | |
| 2 | GND | |||
| J2 | Spannungsversorgung der Kamera | 1 | Vcc | |
| 2 | GND | |||
| J3 | Steuersignal der blauen LED-Diode
(Fernbedienungseingriff) |
1 | Vcc | |
| 2 | GND | |||
| 3 | Steuersignal | IO15, B-27 | ||
| J4 | Eingang der Hall-Signale vom Motor | 1 | NC | |
| 2 | Hall-Signal A | IO6, A-31 | ||
| 3 | Hall-Signal B | IO7, B-31 | ||
| 4 | Hall-Signal C | IO8, A-30 | ||
| 5 | GND | |||
| J5 | Infrarotsensor 3 hinten rechts | 1 | Vcc | |
| 2 | GND | |||
| 3 | Analogausgang des Sensors | , A-44 | ||
| J6 | Infrarotsensor 2 hinten seitlich | 1 | Vcc | |
| 2 | GND | |||
| 3 | Analogausgang des Sensors | , B-46 | ||
| J7 | Ultraschallsensor 1 vorne links | 1 | GND | |
| 2 | Triggersignal des Sensors | , A-16 | ||
| 3 | Triggersignal des Sensors | , A-16 | ||
| 4 | Echosignal des Sensors | , A-7 | ||
| 5 | Vcc | |||
| J8 | Ultraschallsensor 2 vorne rechts | 1 | GND | |
| 2 | NC | |||
| 3 | Triggersignal des Sensors | , | ||
| 4 | Echosignal des Sensors | , | ||
| 5 | Vcc | |||
| J9 | Eingangssignal der Fernbedienung | 1 | NC | |
| 2 | Lenksignal der Fernbedienung | , A-9 | ||
| 3 | Fahrsignal der Fernbedienung | , A-8 | ||
| 4 | Vcc | |||
| 5 | GND | |||
| J10 | Ausgangssignal zu Fahrtenregler | 1 | NC | |
| 2 | Lenksignal | , B-12 | ||
| 3 | Fahrsignal | , B-16 | ||
| 4 | Vcc bei eingesetztem Jumper J21 | |||
| 5 | GND | |||
| J11 | UART RS232 | 1 | CTS | , B-3 |
| 2 | RTS | , A-3 | ||
| 3 | DRS | , B-4 | ||
| 4 | GND | |||
| 5 | DTR | , A-4 | ||
| 6 | RXD | , B-5 | ||
| 7 | TXD | , A-5 | ||
| 8 | DCD | , B-2 | ||
| J12 | Infrarotsensor 4 hinten links | 1 | Vcc | |
| 2 | GND | |||
| 3 | Analogsignal des Sensors | , B-44 | ||
| J13 | Taster | 1 | GND | |
| 2 | Taster 1 | , B-29 | ||
| 3 | Taster 2 | , A-28 | ||
| 4 | Taster 3 | , B-28 | ||
| 5 | Taster 4 | , A-27 | ||
| J14 | Infrarotsensor 1 vorne seite | 1 | Vcc | |
| 2 | GND | |||
| 3 | Analogsignal des Sensors | , A-46 | ||
| J15 | Anschluss A an der dSPACE DS1104 | |||
| J16 | Anschluss B an der dSPACE DS1104 | |||
| J17 | Jumper zur Auswahl, welche Achse aus Gyrosensor gelesen wird | 1 | Z-Achse | |
| 2 | Ausgangssignal der gewählten Achse | , B-48 | ||
| 3 | X-Achse | |||
| J18 | Jumper zur durchleitung der Hall-Signale zu der XOR-Auswertelogik | 1 | Eingang Hall-A | |
| 2 | Ausgang Hall-A | |||
| 3 | Eingang Hall-B | |||
| 4 | Ausgang Hall-B | |||
| 5 | Eingang Hall-C | |||
| 6 | Ausgang Hall-C | |||
| J19 | Ausgang der XOR-Auswertelogik der Hall-Signale. Weiterleitung der Signale über Jumper | 1 | Anschluss des Ausgangssignals von Hall-Auswertelogik an DS1104 | , B-25 |
| 2 | Ausgangssignal von Hall-Auswertelogik | |||
| 3 | Anschluss des invertierten Ausgangssignals von Hall-Auswertelogik an DS1104 | , B-26 | ||
| 4 | Invertiertes Ausgangssignal von Hall-Auswertelogik | |||
| J20 | Steuerung der Lichter | 1 | GND | |
| 2 | Blinker Links | |||
| 3 | Blinker Rechts | |||
| 4 | Bremslicht | |||
| 5 | Rückfahrlicht | |||
| 6 | Fahrlicht | |||
| J21 | Jumper zur Durchleitung von Vcc zu Fahrtenregler | 1 | Pin 4 auf J10 | |
| 2 | Vcc | |||
| J22 | Jumper zur Auswahl des Z-Signals aus dem Gyrosensor. Es soll entweder 1 mit 2 oder 2 mit 3 verbunden werden | 1 | 1x Z | |
| 2 | Weiterleitungspin | |||
| 3 | 4x Z | |||
| J23 | Jumper zur Auswahl des X-Signals aus dem Gyrosensor. Es soll entweder 1 mit 2 oder 2 mit 3 verbunden werden | 1 | 1x X | |
| 2 | Weiterleitungspin | |||
| 3 | 4x X | |||
| J24 | ||||
| J25 | ||||
| J26 | Spannungseingang des Fahr-Akkus zur Spannungsmessung | 1 | GND | |
| 2 | Spannungseingang Akku | , B-50 | ||
| J27 | Spannungseingang der PC-Akkus zur Spannungsmessung | 1 | GND | |
| 2 | Spannungseingang Akku 2 | , A-50 | ||
| 3 | Spannungseingang Akku 1 |
Gyrosensor
Im AMR 2013 wird der Gyroskop LPR510AL eingesetzt. Informationen zum Gyrosensor können hier gelesen werden.
Per Jumper können 3 Einstellungen vorgenommen werden:
- X-Signal wird einfach oder vierfach verstärkt.
| Funktion | Pins auf J23 kurzschließen |
|---|---|
| X-Signal einfach verstärkt | 1 und 2 |
| X-Signal vierfach verstärkt | 2 und 3 |
- Z-Signal wird einfach oder vierfach verstärkt.
| Funktion | Pins auf J22 kurzschließen |
|---|---|
| Z-Signal einfach verstärkt | 1 und 2 |
| Z-Signal vierfach verstärkt | 2 und 3 |
- X- oder Z-Signal werden an DS1104 weitergeleitet.
| Funktion | Pins auf J17 kurzschließen |
|---|---|
| Z-Signal an DS1104 weiterleiten | 1 und 2 |
| X-Signal an DS1104 weiterleiten | 2 und 3 |
-
 Jumper zur Auswahl des Gyrosignals X und Z
Jumper zur Auswahl des Gyrosignals X und Z -
 Jumper zu Auswahl der Verstärkung des Z-Signals des Gyrosensors 1- oder 4-Fach
Jumper zu Auswahl der Verstärkung des Z-Signals des Gyrosensors 1- oder 4-Fach -
 Jumper zu Auswahl der Verstärkung des X-Signals des Gyrosensors 1- oder 4-Fach
Jumper zu Auswahl der Verstärkung des X-Signals des Gyrosensors 1- oder 4-Fach



Rechner
dSPACE DS1104 RCP
Kamera
VRmagic D2 OEM-Version Spannungsversorgung mit Vcc=5V von der Adapterplatine (J2) und Anschluss an dem Rechner über die Ethernet-Schnittstelle
| Funktion | Pins auf J2 |
|---|---|
| 5V-Versorgung der Kamera | 1 |
| GND | 2 |
-
 Stecker zur Spannungsversorgung der Kamera
Stecker zur Spannungsversorgung der Kamera

LIDAR
Ultraschallsensoren
Vorgesehen sind 2 Ultraschallsensoren zur Distanzmessung zu Hindernissen vor dem Fahrzeug. Diese werden an Stecker J7 und J8 angeschlossen.
| Sensorposition | Sensornummer | Anschluss auf Adapterplatine |
|---|---|---|
| Vorne Links | 1 | J7 |
| Vorne Rechts | 2 | J8 |
Der Sensor 1 ist wie folgt verdrahtet:
| Funktion | Pinnummer auf Stecker J7 | Anschluss an DS1104 |
|---|---|---|
| GND | 1 | |
| Triggersignal | 2 | SPWM1 |
| Triggersignal | 3 | SPWM1 |
| Echosignal | 4 | SCAP3 |
| Vcc | 5 |
Der Sensor 2 ist wie folgt verdrahtet:
| Funktion | Pinnummer auf Stecker J8 | Anschluss an DS1104 |
|---|---|---|
| GND | 1 | |
| Nicht verbunden | 2 | |
| Triggersignal | 3 | SPWM2 |
| Echosignal | 4 | SCAP4 |
| Vcc | 5 |
-
 Stecker für die Ultraschallsensoren
Stecker für die Ultraschallsensoren

IR-Sensoren
Es sind 4 Infrarotsensoren zur Abstandsmessung am Fahrzeug angebracht. Weitere Information zum Sensor können hier entnommen werden. Die Sensoren werden wie folgt angeschlossen:
| Sensorposition | Sensornummer | Anschluss auf
Adapterplatine |
Anschluss auf
DS1104 |
|---|---|---|---|
| Hinten Rechts | 3 | J5 | ADCH7 |
| Seite Hinten | 2 | J6 | ADCH6 |
| Hinten Links | 4 | J12 | ADCH8 |
| Seite Vorne | 1 | J14 | ADCH5 |
Dabei haben alle Sensoren folgende Verdrahtung:
| Funktion | Pinnummer |
|---|---|
| Vcc | 1 |
| GND | 2 |
| Analogausgang des Sensors | 3 |
-
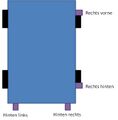 Skizze Sensorpositionen Infrarotsensoren
Skizze Sensorpositionen Infrarotsensoren -
 Anschlüsse der Infrarotsensoren auf der Adapterplatine
Anschlüsse der Infrarotsensoren auf der Adapterplatine


Lichter
Fahrzeugbeleuchtung
-
 Anscluss der Lichter an Adapterplatine
Anscluss der Lichter an Adapterplatine

| Funktion | Anschluss auf
Adapterplatine J20 |
Anschluss auf DS1104 |
|---|---|---|
| GND | 1 | GND |
| Blinker Links | 2 | IO9 |
| Blinker Rechts | 3 | IO5 |
| Bremse | 4 | IO1 |
| Rückfahrlicht | 5 | DACH8 |
| Fahrlicht | 6 | Vcc / immer an! |
Anschlussplatine der Beleuchtung
Eingriffsbeleuchtung / Blaue LED
Die blaue LED zu Signalisierung des Fernbedienungseingriff wird über Stecker J3 angeschlossen.
| Funktion | Pin auf J3 | Anschluss auf DS1104 |
|---|---|---|
| Vcc | 1 | |
| GND | 2 | |
| Steuersignal der Diode | 3 | IO15 |
-
 Anschluss der blauen LED an Adapterplatine
Anschluss der blauen LED an Adapterplatine

Powerpanel
Taster
Programmtaster
Es sind 4 Programmtaster vorhanden. Damit können verschiedene Programmmodi geschaltet werden. Die Taster sind an der Adapterplatine an Stecker J13 angeschlossen.
| Funktion | Pin auf J3 | Anschluss auf DS1104 |
|---|---|---|
| GND | 1 | |
| Taster 1 | 2 | IO11 |
| Taster 2 | 3 | IO12 |
| Taster 3 | 4 | IO13 |
| Taster 4 | 5 | IO14 |
-
 Anschluss der Taster an der Adapterplatine
Anschluss der Taster an der Adapterplatine

Schaltung und Layout
Anschlüsse des Mikrocontrollers
Folgende Tabelle zeigt die Funktion der Anschlüsse des Mikrocontrollers auf der Steuerplatine
| Pin | Port/Name | Funktion |
|---|---|---|
| 1 | PB0 | PC_ON_SWITCH |
| 2 | PB1 | PC_ON_SIGNAL |
| 3 | PB2 | uC_PC_PWR_ENABLE |
| 4 | PB3 | Einschalten Bar-Anzeige 1 |
| 5 | PB4 | Einschalten Bar-Anzeige 2 |
| 6 | PB5 | Baranzeige LED0 |
| 7 | PB6 | Baranzeige LED1 |
| 8 | PB7 | Baranzeige LED2 |
| 9 | !RESET | |
| 10 | VCC | |
| 11 | GND | |
| 12 | NC | |
| 13 | NC | |
| 14 | PD0 | uC_ENABLE_PC_BAT |
| 15 | PD1 | uC_ENABLE_PC_EXTERNAL |
| 16 | PD2 | Baranzeige LED3 |
| 17 | PD3 | Baranzeige LED4 |
| 18 | PD4 | Baranzeige LED5 |
| 19 | PD5 | Reserviert für ein Buzzer |
| 20 | PD6 | Baranzeige LED6 |
| 21 | PD7 | Baranzeige LED7 |
| 22 | PC0 | Baranzeige LED8 |
| 23 | PC1 | Baranzeige LED9 |
| 24 | ||
| 25 | ||
| 26 | ||
| 27 | ||
| 28 | PC6 | BAT_CHECK_SWITCH |
| 29 | ||
| 30 | ||
| 31 | ||
| 32 | ||
| 33 | ||
| 34 | ||
| 35 | ||
| 36 | ||
| 37 | PA3 | Status-LED der externen Stromversorgung (Netzteil) |
| 38 | PA2/ADC2 | Spannungsmessung Fahr-Akku |
| 39 | PA1/ADC1 | Spannungsmessung externe Versorgung (Netzteil) |
| 40 | PA0/ADC0 | Spannungsmessung PC-Akku |
Aufladen der Akkus
Verkabelung
→ zurück zum Hauptartikel: Praktikum SDE