|
|
| (58 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) |
| Zeile 4: |
Zeile 4: |
|
| |
|
|
| |
|
| = Neu =
| |
|
| |
|
| == Übersicht == | | == Übersicht == |
| <gallery widths="560" heights="400"> | | <gallery widths="800" heights="450"> |
| Datei:Fahrzeug.jpg|600px| | | Datei:Fahrzeug 2.1.jpg|600px|Abbildung 1: Fahrzeug 2 |
| | |600px| |
| </gallery> | | </gallery> |
|
| |
|
| == Systemstruktur == | | == Systemstruktur == |
| === Systemarchitekur === | | === Systemarchitekur === |
| <gallery widths="400" heights="200"> | | <gallery widths="600" heights="400"> |
| Datei:Carolo_Systemarchitektur.jpg|600px|Abbildung 1: Systemstruktur des Fahrzeugs | | Datei:Carolo_Systemarchitektur.jpg|600px|Abbildung 2: Systemstruktur des 2. Fahrzeuges |
| </gallery>
| |
| | |
| === Ordnerstruktur ===
| |
| <gallery widths="400" heights="200">
| |
| | |
| </gallery> | | </gallery> |
|
| |
|
| == Inbetriebnahme == | | == Inbetriebnahme == |
| | Die Inbetriebnahme des Fahrzeugs kann mittels des [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2023/Sprint_1/FZG/Inbetriebnahme_Tests.docx Inbetriebnahme_Tests.docx] vorgenommen werden. |
| | Hierbei beschreibt das Dokument alle notwendigen Schritte und Informationen, wie: |
| | * Die benötigten Files und wo diese zu finden sind, |
| | * Die Handhabung der Akkus, |
| | * Das Testen der Sensoren und Aktoren mittels ControlDesk, |
| | * Die benötigten Oberflächen in ControlDesk, |
| | * Das Testen der Fahrzeugkamera |
| | und vieles mehr. |
|
| |
|
| === Dokumente ===
| | Falls die Informationen über die Handhabung der Akkus, wie bspw. das Laden derer, wie im Dokument beschrieben nicht ausreichen sollte, kann der folgende Artikel zu Rate gezogen werden: [[CaroloCup Akkus Messen und Laden|Akkus messen und laden]] <br><br> |
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2023/Sprint_1/FZG/Inbetriebnahme_Tests.docx Inbetriebnahme_Tests.docx] | | Weitere Informationen zum Ein- und Ausschalten des Fahrzeuges anhand des Fahrzeugs 1 finden Sie unter: [[Fahrzeughardware#Fahrzeug hoch-/runterfahren|Fahrzeug hoch-/runterfahren]]. |
|
| |
|
| === Tests === | | === Dokument und nützliche Artikel === |
| Um die Funktionalität des Fahrzeuges zu testen, muss das befolgt werden.
| | * [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2023/Sprint_1/FZG/Inbetriebnahme_Tests.docx Inbetriebnahme/Tests Dokument] <br> |
| | | * [[Signalverarbeitung|Signalverarbeitung]] <br> |
| === Akkus ===
| |
| Bevor das Fahrzeug in Betrieb genommen werden kann, müssen die Akkus überprüft werden. Die Anleitung hierzu finden Sie unter dem folgenden Link:
| |
| * [[CaroloCup Akkus Messen und Laden|Akkus messen und laden]] <br> | | * [[CaroloCup Akkus Messen und Laden|Akkus messen und laden]] <br> |
| | * [[Akku_Aufladen|Akkus aufladen]] <br> |
| | * [[Fahrzeughardware#Fahrzeug hoch-/runterfahren|Fahrzeug hoch-/runterfahren]] <br> |
|
| |
|
| == Gesamtaufbau == | | == Gesamtaufbau == |
| Das Fahrzeug basiert auf einem normalen [http://www.lrp.cc/de/produkte/rc-cars/110-offroad-onroad/produkt/lrp-s10-blast-tc-clubracer-110-elektro-tourenwagen-non-rtr-ohne-reifen-und-karosserie/details 1:10 RC-Fahrzeug] der Firma LRP. Auf dessen Grundgerüst ist ein [http://regpro.mechatronik.uni-linz.ac.at/downloads/pat1/Tutorium/DS1104.pdf DS1104 R&D Controller Board] der Firma DSpace installiert, mit welchem alle angebrachten [[Fahrzeughardware#Sensoren|Sensoren]] verbunden sind. | | Das Fahrzeug basiert auf einem normalen [https://www.lrp.cc/de/produkt/antix-by-lrp-s10-blast-tc-3-clubracer-non-rtr-ohne-reifen-und-karosserie-110-4wd-elektro-tour/ 1:10 RC-Fahrzeug] der Firma LRP. Auf dessen Grundgerüst ist ein [https://www.dspace.com/de/gmb/home/products/hw/singbord/ds1104.cfm DS1104 R&D Controller Board] der Firma DSpace installiert, mit welchem alle angebrachten Sensoren verbunden sind. |
| Über einen VGA-Anschluss an der Front des Fahrzeugs hinter dem Laserscanner kann der Boardcomputer mit einem Monitor verbunden werden. <br> | | Über einen VGA-Anschluss an der Front des Fahrzeugs hinter dem Laserscanner kann der Boardcomputer mit einem Monitor verbunden werden. <br> |
| <br> | | <br> |
| Insgesamt besteht das Fahrzeug aus einzelnen Baugruppen, deren Grundlage jeweils eine gelaserte Aluminiumplatte bildet. Die allgemeine Grundlage bildet die Grundplatte, auf der das Mainboard und die weiteren Baugruppen befestigt ist. Die Grundplatte ist an dem Grundgerüst des gewöhnlichen RC-Fahrzeuggestells befestigt. | | Insgesamt besteht das Fahrzeug aus einzelnen Baugruppen. Die allgemeine Grundlage bildet die Grundplatte, auf der das Mainboard und die weiteren Baugruppen befestigt ist. Die Grundplatte ist an dem Grundgerüst des gewöhnlichen RC-Fahrzeuggestells befestigt. |
| | |
| | === nützliche Links === |
| | * [https://www.lrp.cc/de/produkt/antix-by-lrp-s10-blast-tc-3-clubracer-non-rtr-ohne-reifen-und-karosserie-110-4wd-elektro-tour/ 1:10 RC-Fahrzeug Korpus] <br> |
| | * [https://www.dspace.com/de/gmb/home/products/hw/singbord/ds1104.cfm DSpace DS1104 R&D Controller Board] <br> |
| | |
| | === Fahrzeuggestell=== |
| | <gallery widths="600" heights="400"> |
| | Datei:RC Fahrzeuggestell 2.jpg|600px|Abbildung 3: Fahrzeuggestell des Fahrzeugs |
| | </gallery> |
|
| |
|
| === Maße === | | === Maße === |
| <gallery widths="400" heights="200"> | | <gallery widths="600" heights="400"> |
| Datei:Fahrzeugmaße.png|600px|Abbildung 1: Systemstruktur des Fahrzeugs | | Datei:Fahrzeug_2_abmessungen_draufsicht.png|600px|Abbildung 4: Abmessungen des Fahrzeugs in der Draufsicht |
| | Datei:Fahrzeug_2_abmessungen_seitenansicht.png|600px|Abbildung 5: Abmessungen des Fahrzeugs in der Seitenansicht |
| </gallery> | | </gallery> |
|
| |
|
| === Position der Sensoren === | | === Position der Sensoren === |
| <gallery widths="400" heights="200"> | | Die Sensoren des Fahrzeuges gliedern sich wie folgt: |
| Seitenansicht Sensoren.JPG|600px|Abbildung 1: Seitenansicht Fahrzeug - Überblick über die Sensoren
| | * Vier IR-Sensoren (zwei an einer Seite und zwei am Heck des Fahrzeuges), |
| Datei:Draufsicht Sensoren.JPG|600px|Abbildung 1: Draufsicht Fahrzeug - Überblick über die Sensoren | | * Eine Kamera, |
| | * Ein LiDAR, |
| | * Hall-Sensoren im Motor, |
| | * Ein Gyro zum Messen der Gierrate um die z-Achse auf der Platine. |
| | |
| | <gallery widths="600" heights="400"> |
| | Datei:Fahrzeug_2_sensoren_position_draufsicht.png|600px|Abbildung 6: Überblick über die Sensoren des Fahrzeugs in der Draufsicht |
| | Datei:Fahrzeug_2_sensoren_position_ruecksicht.png|600px|Abbildung 7: Überblick über die Sensoren des Fahrzeugs mit der Sicht auf die Rückseite |
| | Datei:Fahrzeug_2_sensoren_position_seitenansicht.png|600px|Abbildung 8: Überblick über die Sensoren des Fahrzeugs in der Seitenansicht |
| </gallery> | | </gallery> |
|
| |
|
| === Power Panel === | | === Power Panel === |
| <gallery widths="400" heights="200"> | | Über das Powerpanel am Heck des Fahrzeuges können: |
| Datei:Schalter_Akkubetrieb.jpg|600px|Abbildung 1: Anschlussplatte Rückseite | | * Die Fahrmodi eingestellt, |
| | * Das Fahrzeug ein- und ausgeschaltet, |
| | * Die Akkuunterstützung zugeschaltet, |
| | * Die Akkuspannung mittels des Akkutesters gemessen |
| | * Das PC-Netzteil verbunden werden. |
| | <gallery widths="600" heights="400"> |
| | Datei:Fahrzeug_2_power_panel.jpg|600px|Abbildung 9: Power Panel auf der Rückseite des Fahrzeugs |
| </gallery> | | </gallery> |
|
| |
|
| === Test Kamera === | | === Test Kamera === |
| <gallery widths="400" heights="200"> | | <gallery widths="600" heights="400"> |
| Datei:Fahrzeug_2.0.jpg|600px|Abbildung 1: Anschlussplatte Rückseite | | Datei:Kamera_fahrzeug_2_testaufbau.jpg|600px|Abbildung 10: Test Kamera des Fahrzeugs |
| </gallery> | | </gallery> |
|
| |
|
| == Sensoren und Aktoren == | | == Sensoren und Aktoren == |
| Im Folgenden werden alle relevanten Artikel für jeden Sensor und Aktor des Fahrzeugs. | | Im Folgenden werden alle relevanten Artikel für jeden Sensor und Aktor des Fahrzeugs aufgelistet. |
|
| |
|
| === Kamera === | | === Kamera === |
| Zeile 95: |
Zeile 122: |
| === Motorsteuergerät === | | === Motorsteuergerät === |
| * [[LRP_Motorsteuerung|LRP Motorsteuergerät]] <br> | | * [[LRP_Motorsteuerung|LRP Motorsteuergerät]] <br> |
|
| |
| = Alt =
| |
|
| |
|
| |
|
| |
| == Fahrzeug hoch-/runterfahren==
| |
|
| |
| === Einschalten im Akku-Betrieb ===
| |
| Um das Fahrzeug alleine über die Akkus zu versorgen, muss der rote Kippschalter am Panel eingeschaltet werden. Auch hier gilt im Anschluss das Betätigen des schwarzen Tasters, wie beim [[Fahrzeughardware#Einschalten im Netzbetrieb|Einschalten im Netz-Betrieb]].
| |
|
| |
| [[Datei:Schalter_Akkubetrieb.jpg|400px|Schalter zum Einschalten des Akku-Betriebs]]
| |
|
| |
| Autor:[[Benutzer:Jiaxiang Xia|Jiaxiang Xia]] ([[Benutzer Diskussion:Jiaxiang Xia|Diskussion]]) 15:45, 3. Dez.2022 (CET)
| |
|
| |
| Bild:[[Benutzer:Jiaxiang Xia|Jiaxiang Xia]] ([[Benutzer Diskussion:Jiaxiang Xia|Diskussion]]) 11:07, 1. Nov. 2022 (CET)
| |
|
| |
| === Ausschalten des PCs ===
| |
| Grundsätzlich wird der PC durch softwaretechnisches Herunterfahren ausgeschaltet.
| |
|
| |
| Im Notfall ist dies aber entweder durch Drücken des roten Kippschalters (Ein-/Ausschalter) des Powerpanels im Akkubetrieb oder durch Herausziehen des Netzteilsteckers im Netzbetrieb möglich.
| |
|
| |
| ACHTUNG!! Automatisches Herunterfahren des PCs im Akkubetrieb möglich, wenn Akkuspannung unter 13,1V fällt (Sicherheitsabschaltung/Unterspannungsschutz).
| |
| Beim Arbeiten im Akkubetrieb sollte demnach auf die Spannung geachtet und zwischendurch oft gespeichert werden.
| |
|
| |
|
| |
| Autor: [[Benutzer:Sascha Dienwiebel|Sascha Dienwiebel]] ([[Benutzer Diskussion:Sascha Dienwiebel|Diskussion]]) 16:46, 4. Feb. 2014 (CET)
| |
|
| |
| === Ansteuerung des Antrieb- und Servomotors einschalten ===
| |
| Um mit dem Bordcomputer sowohl im Netz- als auch im Akku-Betrieb die Motoren ansteuern zu können, muss der silberne Kippschalter (versteckt hinter dem Powerpanel) in nachfolgender Abbildung in die rechte Stellung gestellt werden. Bei Linksstellung ist die Ansteuerung unterbrochen.
| |
|
| |
| [[Datei:Kippschalter_Motoransteuerung.png|400px|Bild fehlt noch: silberner Kippschalter hinter dem Panel]]
| |
|
| |
| Autor: [[Benutzer:Sascha Dienwiebel|Sascha Dienwiebel]] ([[Benutzer Diskussion:Sascha Dienwiebel|Diskussion]]) 14:03, 6. Feb. 2014 (CET)
| |
|
| |
| == Sensoren==
| |
|
| |
| Stellen Sie sicher, dass der Infrarot Sensor nicht verdeckt ist, bevor Sie den Fahrzeug testen.
| |
|
| |
| Autor: [[Benutzer:Jiaxiang Xia|Jiaxiang Xia]] ([[Benutzer Diskussion:Jiaxiang Xia|Diskussion]]) 00:29, 2. Dez.2022 (CET)
| |
|
| |
| === Taster ===
| |
|
| |
| Die Taster an der Rückseite des Fahrzeugs dienen der Aktivierung der verschiedenen Algorithmen, d.h. Einparkalgorithmus oder Fahrt auf Rundkurs.
| |
|
| |
|
| |
| [[Datei:PowerPanel_Taster.png|400px|Taster am Power panel]]
| |
|
| |
| Bild: [[Benutzer:Philipp Tewes|Philipp Tewes]] ([[Benutzer Diskussion:Philipp Tewes|Diskussion]]) 13:58, 1. Feb. 2017 (CET)
| |
|
| |
|
| |
| Die Taster sind wie folgt belegt und mit der DS-Karte verbunden:
| |
| {|border="1"
| |
| |Taster
| |
| |Funktion
| |
| |DS1104-Anschluss
| |
|
| |
| |-
| |
| |Weiß
| |
| |[[Kalibrierung des Gyrosensors]]
| |
| |IO14
| |
| |-
| |
| |Gelb
| |
| |[[Fahrzeugsoftware#bib_BahnPlanungSpurfuehrung.mdl|Bahnspurführung Rundkurs ohne Hindernisse]]
| |
| |IO12
| |
| |-
| |
| |Blau
| |
| |[[Fahrzeugsoftware#bib_BahnPlanungSpurfuehrung.mdl|Bahnspurführung Rundkurs mit Hindernissen]]
| |
| |IO13
| |
| |-
| |
| |Rot
| |
| |[[Fahrzeugsoftware#bib_AutonomesEinparken.mdl|Einparkalgorithmus starten]]
| |
| |IO11
| |
| |-
| |
| |-
| |
| |Grün
| |
| |''Nicht mehr vorhanden''
| |
| |-
| |
| |}
| |
| Der aktuelle Pinbelegungsplan der DS1104 befindet sich unter [http://193.175.248.52/usvn/svn/MTR_SDE_Praktikum/trunk/ SVN Unterlagen]\Dokumentation\Systemarchitektur\DS1104 - Adapterkabel – Pinbelegungsplan.xlsx
| |
|
| |
|
| |
| Die Implementierung der Taster in das Simulinkmodell ist unter "[[Fahrzeugsoftware#Einlesen der Taster|Einlesen der Taster]]" erklärt.
| |
|
| |
|
| |
| Autoren:
| |
|
| |
| [[Benutzer:Julia Mueller|Julia Müller]] ([[Benutzer Diskussion:Julia Mueller|Diskussion]]) 10:22, 4. Feb. 2014 (CET)
| |
|
| |
| Update: [[Benutzer:Vincent Holthaus|Vincent Holthaus]] 13:44 Uhr, 22. Nov. 2019 (CET)
| |
|
| |
| [[Benutzer:Sascha Dienwiebel|Sascha Dienwiebel]] ([[Benutzer Diskussion:Sascha Dienwiebel|Diskussion]]) 12:56, 4. Feb. 2014 (CET)
| |
|
| |
| === Infrarotsensoren ===
| |
|
| |
| Die Infrarotsensoren dienen der Positionserfassung bzw. Abstandsmessung von Objekten im Umfeld des Fahrzeuges. In Kombination mit dem Hall- und Gyro-Sensor werden die Infrarotsensoren für den Einparkalgorithmus verwendet. Erweiterte Informationen zum Einsatz und zur Funktion sind im Artikel [[Infrarotsensoren|Infrarotsensoren]] zu finden.
| |
|
| |
| === Gierratensensor ===
| |
| Der Gierratensensor (oder auch Gyrosensor bzw. Drehratensensor) des Autonomen Fahrzeugs stellt unter anderem einen Teil der Einparksensorik dar, die Ermittlung der Rotationsgeschwindigkeit des Fahrzeugs erfolgt über diesen. Weitere Informationen unter [[Gyrosensor (LPR510AL)|Gierratensensor]].
| |
|
| |
| === Hall-Sensor ===
| |
|
| |
| Der Hall-Sensor befindet sich am Antriebsmotor. Mithilfe des Hall-Sensors sollen die aktuelle Geschwindigkeit, die Fahrtrichtung und die zurückgelegte Strecke bestimmt werden. Die Bestimmung der Geschwindigkeit und Fahrtrichtung sind wesentliche Bestandteile des Regelkreises der Bahnplanung und Spurführung. Die Messung der zurückgelegten Strecke wird für die Bestimmung der Parklückengröße benötigt. Die weiteren Details der Hardware, sowie das physikalische Messprinzip sind in dem Artikel [[Hall-Sensor|Hall-Sensor]] beschrieben.
| |
|
| |
| ===Platine für die Verbindung zwischen der Fernbedienung den Aktoren und der D-Space Karte===
| |
| In diesem Kapitel wird die Platine beschrieben, die die D-Space Karte mit der Hardware des RC-Autos verbindet.
| |
| In der unten stehenden Abbildung ist der Schaltplan der Platine zu sehen. Die Stecker "ST/TH in" kommen von dem RC Empfänger. Die Stecker für "ST/TH out" verbinden den Servo und den Antriebsmotor mit der D-Space Karte.<br>
| |
| [[Datei:RC_DC-Space_Adapterplatine.png]]
| |
|
| |
|
| |
| Autor[Benutzer:Timo Schmidt| Timo Schmidt]
| |
|
| |
| === Laser Scanner ===
| |
|
| |
| Es ist der LIDAR Sensor URG-04LX-UG01 der Firma HOKUYU verbaut, der einen Laserstrahl im Infrarotbereich (785nm) aussendet. Grundsätzlich ist der Sensor dazu geeignet, um die Distanz und den Winkel zu einem Objekt zu messen. LIDAR Sensoren spielen eine zentrale Rolle auf dem Weg zum automatisierten Fahren. Als markantes Merkmal sind die ersten selbstfahrenden Fahrzeuge von Google beispielsweise mit einem LIDAR Sensor auf dem Dach ausgestattet, die eine Rundumsicht ermöglichen.
| |
| ; Funktionsweise
| |
|
| |
| Um nicht nur einen einzelnen Punkt vor dem Fahrzeug zu erfassen, wird der Laserstrahl durch einen drehbaren Spiegel nach links und rechts abgelenkt. Dadurch wird ein Winkelbereich von 240° bei einer Winkelauflösung von 0.36° erfasst.
| |
| Die Messung der Distanz erfolgt bei diesem Sensor nicht nach dem Time of Flight Prinzip, sondern wird durch die Phasenverschiebung des zurückreflektierten Sensorstrahls errechnet.
| |
| Aus den so gewonnenen Polarkoordinaten kann die Objekt-Position in kartesischen Koordinaten errechnet werden.
| |
|
| |
| Der Sensor wird über USB mit dem PC verbunden und kann durch eine mitgelieferte API über C/C++ angesprochen werden.
| |
|
| |
| <gallery widths=300px heights=300px perrow=7>
| |
|
| |
| File:LidarTargetPlot.png|Rohziele des Lidar Sensors(blau)und erkannte Objekte (rot)
| |
| File:LidarObjects.png|2 Objekte vor dem Sensor
| |
|
| |
| </gallery>
| |
|
| |
| Autor: [[Benutzer:Stephan Maier|Stephan Maier]] ([[Benutzer Diskussion:Stephan Maier|Diskussion]]) 09:01, 12. Juli. 2016 (CET)
| |
|
| |
| === Kamera ===
| |
| Die Inbetriebnahme der Kamera wird im Artikel [https://wiki.hshl.de/wiki/index.php/Inbetriebnahme_der_VRmagic_Kamera Inbetriebnahme der VRmagic Kamera] beschrieben. <br>
| |
| Der aktuelle Softwarestand der Kamera ist in folgendem Artikel beschrieben: '''[[OSE Softwareumgebung| OSE Softwareumgebung]]'''
| |
|
| |
| == Fernbedienung==
| |
|
| |
| Bei der Fernbedienung handelt es sich um eine 2-Kanal-Fernsteueranlage. Die Fernsteueranlage besteht aus einem Empfänger und einem Sender, d.h. einer Fernbedienung. Mithilfe der Fernbedienung kann sowohl die Lenkung als auch der Fahrtenregler des Fahrzeugs gesteuert werden.
| |
|
| |
| Die Fernbedienung wird benötigt um das Fahrezeug einsatzfähig zu machen. Erst durch Einschalten der Fernbedienung kann das Fahrzeug autonom fahren. Vor dem ersten Start muss die Fernbedienung kalibriert werden (siehe [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Dokumentation/Fahrzeug/Remote_Control/RemoteControl.docx SVN]). Nach erfolgreicher Kalibrierung ist die blau blinkende LED erloschen und das Fahrzeug kann autonom fahren. Der Eingriff, also die Betätigung der Fernbedienung, unterbricht das autonome Fahren und darf in Notsituationen eingesetzt werden. Eine Notsituation ist immer dann vorhanden, wenn das Fahrzeug die geforderte Aufgabe nicht mehr erfüllt. Über den RC-Modus kann das Fahrzeug dann angehalten und verfahren werden.
| |
| Ein Eingriff ist erfolgt, sobald der Gas-/Bremshebel oder das Drehrad der Lenkung betätigt wird. Der Eingriff muss über die blau blinkende LED am höchsten Punkt des Fahrzeugs signalisiert werden.
| |
|
| |
| ;Funktionsweise
| |
|
| |
| Die Fernbedienung überträgt zwei Signale. Ein Signal liefert die Informationen über den Lenkwinkel und das zweite Signal liefert die Informationen für das Gas- und Bremsverhalten. Gesendet werden PWM-Signale. Die Übertragung erfolgt durch Quarze mit der gleichen Frequenz, die sich im Sender und Empfänger befinden.
| |
| Die Fernbedienung verfügt neben dem Drehrad für die Lenkung und dem Gas-/Bremshebel über weitere Schalter und Drehräder. Diese dienen verschiedenen Einstellungen an der Fernbedienung. Beispielsweise kann mithilfe von Trimmreglern die Neutralstellung der Lenkung und des Antriebs eingestellt werden.
| |
| Details zu den Einstellungen und Funktionen sind in der Bedienungsanleitung zu finden. Diese ist im [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Dokumentation/Fahrzeug/Remote_Control/Bedienungsanleitung_Fernsteueranlage.pdf SVN] abgelegt. Um den RC-Modus zum ersten Mal lauffähig zu machen muss die Anleitung im SVN beachtet werden ([https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Dokumentation/Fahrzeug/Remote_Control/RemoteControl.docx Link]). Nach aktuellem Stand ist die Fernbedienung korrekt kalibriert und einsatzbereit. Über die ControlDesk Oberfläche kann der RC-Modus getestet werden. Das Simulink-Online-Modell muss, der Anleitung entsprechend, verändert werden. Nach der Kompilierung und der erfolgreichen Übertragung auf die dSpace Karte, kann der RC-Modus vollständig genutzt werden.
| |
|
| |
|
| |
| ;Hardware-Anbindung
| |
|
| |
| Der Empfänger ist mit der DS1104 Karte verbunden. Laut aktuellem Pinbelegungsplan der DS1104 ([https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Dokumentation/Systemarchitektur/Adapterplatine/DS1104-Adapterkabel-Pinbelegungsplan.xlsx Pinbelegungsplan]) ist der Empfänger wie folgt angeschlossen:
| |
|
| |
| {|border="1"
| |
| |Sender-Anschluss
| |
| |Kabelfarbe
| |
| |DS1104 Anschluss
| |
| |-
| |
| |RC-In Signal FR
| |
| |orange
| |
| |SCAP2
| |
| |-
| |
| |RC-In Signal LS
| |
| |orange
| |
| |SCAP1
| |
| |-
| |
| |RC-Out Signal LS
| |
| |orange
| |
| |ST2PWM
| |
| |-
| |
| |RC-Out Signal FR
| |
| |orange
| |
| |SPWM7
| |
| |}
| |
|
| |
| Wobei LS für Lenk-Servo uns FR für Fahrtenregler steht.
| |
|
| |
|
| |
| Autor: [[Benutzer:Pascal Funke|Pascal Funke]] ([[Benutzer Diskussion:Pascal Funke|Diskussion]]) 09:26, 4. Jan. 2019 (CET)
| |
|
| |
|
| == Literatur== | | == Literatur== |
| Zeile 283: |
Zeile 131: |
|
| |
|
| ---- | | ---- |
| → zurück zum Hauptartikel: [[Praktikum_SDE|Praktikum SDE]] | | → zurück zum Hauptartikel: [[Praktikum_SDE|Praktikum SDE]]<br> |
| | → zu erstem Fahrzeug: [[Fahrzeughardware|Fahrzeug 1]] |
Autor: Prof. Dr.-Ing. Schneider
Übersicht
Systemstruktur
Systemarchitekur
Inbetriebnahme
Die Inbetriebnahme des Fahrzeugs kann mittels des Inbetriebnahme_Tests.docx vorgenommen werden.
Hierbei beschreibt das Dokument alle notwendigen Schritte und Informationen, wie:
- Die benötigten Files und wo diese zu finden sind,
- Die Handhabung der Akkus,
- Das Testen der Sensoren und Aktoren mittels ControlDesk,
- Die benötigten Oberflächen in ControlDesk,
- Das Testen der Fahrzeugkamera
und vieles mehr.
Falls die Informationen über die Handhabung der Akkus, wie bspw. das Laden derer, wie im Dokument beschrieben nicht ausreichen sollte, kann der folgende Artikel zu Rate gezogen werden: Akkus messen und laden
Weitere Informationen zum Ein- und Ausschalten des Fahrzeuges anhand des Fahrzeugs 1 finden Sie unter: Fahrzeug hoch-/runterfahren.
Dokument und nützliche Artikel
Gesamtaufbau
Das Fahrzeug basiert auf einem normalen 1:10 RC-Fahrzeug der Firma LRP. Auf dessen Grundgerüst ist ein DS1104 R&D Controller Board der Firma DSpace installiert, mit welchem alle angebrachten Sensoren verbunden sind.
Über einen VGA-Anschluss an der Front des Fahrzeugs hinter dem Laserscanner kann der Boardcomputer mit einem Monitor verbunden werden.
Insgesamt besteht das Fahrzeug aus einzelnen Baugruppen. Die allgemeine Grundlage bildet die Grundplatte, auf der das Mainboard und die weiteren Baugruppen befestigt ist. Die Grundplatte ist an dem Grundgerüst des gewöhnlichen RC-Fahrzeuggestells befestigt.
nützliche Links
Fahrzeuggestell
Maße
Position der Sensoren
Die Sensoren des Fahrzeuges gliedern sich wie folgt:
- Vier IR-Sensoren (zwei an einer Seite und zwei am Heck des Fahrzeuges),
- Eine Kamera,
- Ein LiDAR,
- Hall-Sensoren im Motor,
- Ein Gyro zum Messen der Gierrate um die z-Achse auf der Platine.
-
Abbildung 6: Überblick über die Sensoren des Fahrzeugs in der Draufsicht
-
Abbildung 7: Überblick über die Sensoren des Fahrzeugs mit der Sicht auf die Rückseite
-
Abbildung 8: Überblick über die Sensoren des Fahrzeugs in der Seitenansicht
Power Panel
Über das Powerpanel am Heck des Fahrzeuges können:
- Die Fahrmodi eingestellt,
- Das Fahrzeug ein- und ausgeschaltet,
- Die Akkuunterstützung zugeschaltet,
- Die Akkuspannung mittels des Akkutesters gemessen
- Das PC-Netzteil verbunden werden.
Test Kamera
Sensoren und Aktoren
Im Folgenden werden alle relevanten Artikel für jeden Sensor und Aktor des Fahrzeugs aufgelistet.
Kamera
Gierraten Sensor
Infrarot-Abstandssensoren
Hall-Sensoren
LiDAR
Taster
Fernbedienung
Motorsteuergerät
Literatur
[HeSch09] Hesse, Stefan; Schnell, Gerhard: Sensoren für die Prozess- und Fabrikautomation, Auflage 4; Wiesbaden, 2009
[KlCD12] Klein, Daniel; Carolo_Doku_2012: Die Hallsensorik, S.174 ff., Lippstadt, 2012
→ zurück zum Hauptartikel: Praktikum SDE
→ zu erstem Fahrzeug: Fahrzeug 1
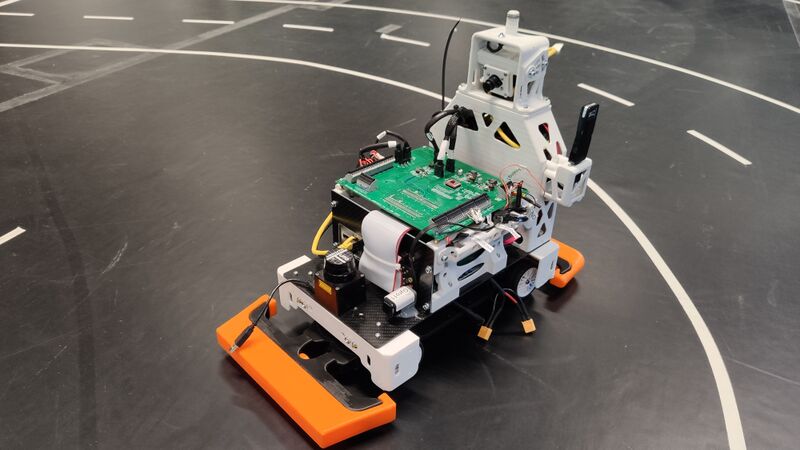 Abbildung 1: Fahrzeug 2
Abbildung 1: Fahrzeug 2
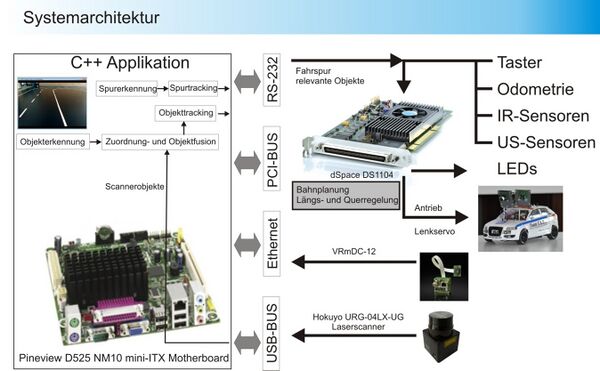 Abbildung 2: Systemstruktur des 2. Fahrzeuges
Abbildung 2: Systemstruktur des 2. Fahrzeuges
 Abbildung 3: Fahrzeuggestell des Fahrzeugs
Abbildung 3: Fahrzeuggestell des Fahrzeugs
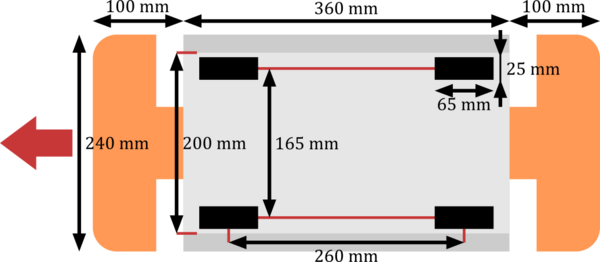 Abbildung 4: Abmessungen des Fahrzeugs in der Draufsicht
Abbildung 4: Abmessungen des Fahrzeugs in der Draufsicht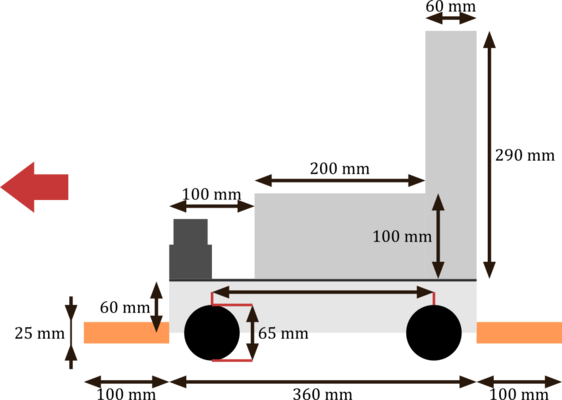 Abbildung 5: Abmessungen des Fahrzeugs in der Seitenansicht
Abbildung 5: Abmessungen des Fahrzeugs in der Seitenansicht

 Abbildung 6: Überblick über die Sensoren des Fahrzeugs in der Draufsicht
Abbildung 6: Überblick über die Sensoren des Fahrzeugs in der Draufsicht Abbildung 7: Überblick über die Sensoren des Fahrzeugs mit der Sicht auf die Rückseite
Abbildung 7: Überblick über die Sensoren des Fahrzeugs mit der Sicht auf die Rückseite Abbildung 8: Überblick über die Sensoren des Fahrzeugs in der Seitenansicht
Abbildung 8: Überblick über die Sensoren des Fahrzeugs in der Seitenansicht


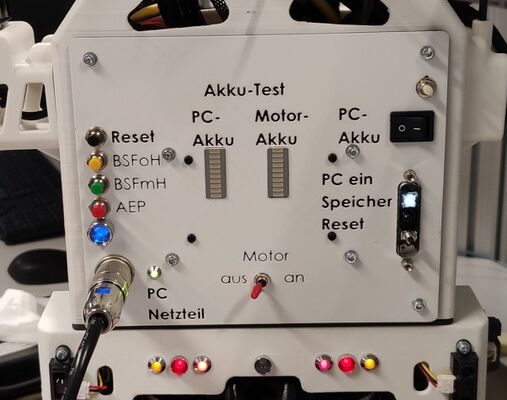 Abbildung 9: Power Panel auf der Rückseite des Fahrzeugs
Abbildung 9: Power Panel auf der Rückseite des Fahrzeugs
 Abbildung 10: Test Kamera des Fahrzeugs
Abbildung 10: Test Kamera des Fahrzeugs