Messaufbau mit Arduino: Gyroskop: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (82 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
[[Kategorie:Projekte]] | [[Kategorie:Projekte]] | ||
[[Datei:GyroVideoGIFwiki.gif|mini|600px|Abb. 1: Gyro-Messsystem]] | |||
'''Author:''' [[Benutzer:....| .... ]]<br/> | |||
'''Author:''' [[Benutzer: | |||
'''Art:''' Praxissemester<br> | '''Art:''' Praxissemester<br> | ||
'''Dauer:''' 02.05.2023 - 21.08.2023<br> | '''Dauer:''' 02.05.2023 - 21.08.2023<br> | ||
'''Betreuer:''' [[Benutzer:Ulrich_Schneider| Prof. Dr.-Ing Ulrich Schneider]]<br/> | '''Betreuer:''' [[Benutzer:Ulrich_Schneider| Prof. Dr.-Ing Ulrich Schneider]]<br/> | ||
== Einleitung == | == Einleitung == | ||
Das Gyroskop-Projekt wird es uns ermöglichen, die Daten einer kontinuierlichen Drehung eines Gyroskops zu erfassen und sie zur Analyse an unsere Steuereinheit zu senden. In diesem Projekt werden wir das Gyroskop drehen und seine Daten über einen Schleifring übertragen. Das Hauptaugenmerk des Projekts liegt darauf, die Daten an das DS1104 R&D Controller Board zu senden. Und dafür brauchen wir ein robustes System, das einen Schleifring und einen Encoder enthält. Die größte Herausforderung beim Aufbau des Systems ist die Hardware-Montage. Wir werden uns also mehr darauf konzentrieren. | Das Gyroskop-Projekt wird es uns ermöglichen, die Daten einer kontinuierlichen Drehung eines Gyroskops zu erfassen und sie zur Analyse an unsere Steuereinheit zu senden. In diesem Projekt werden wir das Gyroskop drehen und seine Daten über einen Schleifring übertragen. Das Hauptaugenmerk des Projekts liegt darauf, die Daten an das DS1104 R&D Controller Board zu senden. Und dafür brauchen wir ein robustes System, das einen Schleifring und einen Encoder enthält. Die größte Herausforderung beim Aufbau des Systems ist die Hardware-Montage. Wir werden uns also mehr darauf konzentrieren. | ||
== Anforderungen == | == Anforderungen == | ||
| Zeile 43: | Zeile 39: | ||
| Marc Ebmeyer | | Marc Ebmeyer | ||
| 27.07.2023 | | 27.07.2023 | ||
| | | Rafsan | ||
| | | 14.08.2023 | ||
|- | |- | ||
| 4 | | 4 | ||
| Zeile 59: | Zeile 55: | ||
| Rafsan | | Rafsan | ||
| 09.08.2023 | | 09.08.2023 | ||
|} | |} | ||
| Zeile 87: | Zeile 62: | ||
<gallery widths="650" heights="400"> | <gallery widths="650" heights="400"> | ||
Datei:GyroUMLdesign.jpg|600px|mini|Abb. 2: Dieser Entwurf zeigt die Wechselwirkungen zwischen den Komponenten des Systems | Datei:GyroUMLdesign.jpg|600px|mini|Abb. 2: Dieser Entwurf zeigt die Wechselwirkungen zwischen den Komponenten des Systems | ||
Datei: | Datei:WireConnection1.jpg|600px|mini|Abb. 3: Dieses Diagramm zeigt die Verbindung zwischen den Schaltelementen | ||
</gallery> | </gallery> | ||
| Zeile 99: | Zeile 74: | ||
<gallery widths="400" heights="300"> | <gallery widths="400" heights="300"> | ||
Datei:GY35 sensor.jpg|400px|mini|Abb. | Datei:GY35 sensor.jpg|400px|mini|Abb. 4: GY 35 ENC-03RC | ||
Datei:GY35.jpg|400px|mini|Abb. | Datei:GY35.jpg|400px|mini|Abb. 5: Installierte GY 35 im System | ||
</gallery> | </gallery> | ||
| Zeile 107: | Zeile 82: | ||
<gallery widths="400" heights="250"> | <gallery widths="400" heights="250"> | ||
Datei:Fc03.jpg|400px|mini|Abb. | Datei:Fc03.jpg|400px|mini|Abb. 6: Encoder Geschwindigkeit Optische Kopplung FC-03 Sensor | ||
Datei:Fc03mountedWheel.jpg|400px|mini|Abb. | Datei:Fc03mountedWheel.jpg|400px|mini|Abb. 7: Installierte FC 03 mit Rad im System | ||
</gallery> | </gallery> | ||
| Zeile 115: | Zeile 90: | ||
<gallery widths="400" heights="300"> | <gallery widths="400" heights="300"> | ||
Datei:Servo Motor SG90.jpg|400px|mini|Abb. | Datei:Servo Motor SG90.jpg|400px|mini|Abb. 8: Servomotor 9g SG90 (von uns modifiziert) | ||
Datei:ServoInstalled1.jpg|400px|mini|Abb. | Datei:ServoInstalled1.jpg|400px|mini|Abb. 9: Installierte Servomotor 9g SG90 im System | ||
</gallery> | </gallery> | ||
| Zeile 125: | Zeile 100: | ||
<gallery widths="300" heights="200"> | <gallery widths="300" heights="200"> | ||
Datei:SlipRingMounted.jpg|400px|mini|Abb. | Datei:SlipRingMounted.jpg|400px|mini|Abb. 10: Installierte Schleifring im System | ||
</gallery> | </gallery> | ||
| Zeile 132: | Zeile 107: | ||
<gallery widths="300" heights="200"> | <gallery widths="300" heights="200"> | ||
Datei:microcontrollerfunduino.jpg|400px|mini|Abb. | Datei:microcontrollerfunduino.jpg|400px|mini|Abb. 11: Der Mikrocontroller Funduino zum Testen des Systems | ||
</gallery> | </gallery> | ||
| Zeile 141: | Zeile 116: | ||
Die Hauptbasis des Systems ist der Boden, der alle Komponenten trägt. Sie ist in zwei Teile unterteilt, einer ist der Haltebereich für Servo, Gyro, Encoder und Schleifring. Der andere ist die Erweiterung, die die Leiterplatte aufnimmt. Die Leiterplatte fungiert als Hauptsteuergerät. Wir können auch einen Arduino anstelle der Platine einsetzen. | Die Hauptbasis des Systems ist der Boden, der alle Komponenten trägt. Sie ist in zwei Teile unterteilt, einer ist der Haltebereich für Servo, Gyro, Encoder und Schleifring. Der andere ist die Erweiterung, die die Leiterplatte aufnimmt. Die Leiterplatte fungiert als Hauptsteuergerät. Wir können auch einen Arduino anstelle der Platine einsetzen. | ||
==== Der | ==== Der Base ==== | ||
Der Boden ist der Bereich, in dem sich die Komponenten befinden | Der Boden ist der Bereich, in dem sich die Komponenten befinden | ||
| Zeile 148: | Zeile 123: | ||
<gallery widths="600" heights="400"> | <gallery widths="600" heights="400"> | ||
Datei:System Base.jpg|600px|mini|Abb. | Datei:System Base.jpg|600px|mini|Abb. 12: Der wichtigste Aufbewahrungsort für alle Komponenten | ||
Datei:PCBHolderExtension.jpg|600px|mini|Abb. | Datei:PCBHolderExtension.jpg|600px|mini|Abb. 13: Die Verlängerung der Hauptstruktur, die die Leiterplatte hält | ||
</gallery> | </gallery> | ||
| Zeile 159: | Zeile 134: | ||
<gallery widths="500" heights="400"> | <gallery widths="500" heights="400"> | ||
Datei:SlipRingHolder.jpg|500px|mini|Abb. | Datei:SlipRingHolder.jpg|500px|mini|Abb. 14: Der Haltebereich für den Schleifring | ||
Datei:Column.jpg|500px|mini|Abb. | Datei:Column.jpg|500px|mini|Abb. 15: Säule zur Unterstützung des Schleifringhalters | ||
Datei:Shaft&Holder.jpg|500px|mini|Abb. | Datei:Shaft&Holder.jpg|500px|mini|Abb. 16: Die Verbindung zwischen Schleifringhalter und Säule und der Welle | ||
</gallery> | </gallery> | ||
| Zeile 168: | Zeile 143: | ||
<gallery widths="600" heights="400"> | <gallery widths="600" heights="400"> | ||
Datei:ServoHolder.jpg|600px|mini|Abb. | Datei:ServoHolder.jpg|600px|mini|Abb. 17: Die Halterung für den Servomotor | ||
Datei:Servomounted.jpg|600px|mini|Abb. | Datei:Servomounted.jpg|600px|mini|Abb. 18: Montierter Servomotor im Inneren des Halters | ||
</gallery> | </gallery> | ||
| Zeile 182: | Zeile 157: | ||
<gallery widths="500" heights="500"> | <gallery widths="500" heights="500"> | ||
Datei:SlipRing_Gyro-Connector.jpg|500px|mini|Abb. | Datei:SlipRing_Gyro-Connector.jpg|500px|mini|Abb. 19: Der rot markierte Bereich zeigt den Stecker und die Kabel, die durch ihn gehen | ||
Datei:GyroHolder.jpg|500px|mini|Abb. | Datei:GyroHolder.jpg|500px|mini|Abb. 20: Die rot markierte Kastenform, die den Halter GY 35 kennzeichnet | ||
Datei:OverallShaft.jpg|500px|mini|Abb. | Datei:OverallShaft.jpg|500px|mini|Abb. 21: Der rot markierte Bereich zeigt die gesamte Welle | ||
</gallery> | </gallery> | ||
| Zeile 191: | Zeile 166: | ||
<gallery widths="500" heights="400"> | <gallery widths="500" heights="400"> | ||
Datei:GyroServo1.jpg|600px|mini|Abb. | Datei:GyroServo1.jpg|600px|mini|Abb. 22: Der obere Teil des dritten Steckers, der den GY 35-Halter und den unteren Teil, der das Geberrad hält, verbindet | ||
Datei:WheelHolder.jpg|600px|mini|Abb. | Datei:WheelHolder.jpg|600px|mini|Abb. 23: Der untere Teil des 3. Teils der Welle. Er enthält das Geberrad und ist mit dem Servokopf verbunden | ||
Datei:Servo&ShaftBottom.jpg|600px|mini|Abb. | Datei:Servo&ShaftBottom.jpg|600px|mini|Abb. 24: Das Servo und der untere Anschluss der Welle | ||
</gallery> | </gallery> | ||
| Zeile 200: | Zeile 175: | ||
<gallery widths="600" heights="500"> | <gallery widths="600" heights="500"> | ||
Datei:EncoderWall.jpg|600px|mini|Abb. | Datei:EncoderWall.jpg|600px|mini|Abb. 25: Der Halter für den Inkrementalgeber FC 03 | ||
Datei:EncoderMountedWall.jpg|600px|mini|Abb. | Datei:EncoderMountedWall.jpg|600px|mini|Abb. 26: Der FC 03 ist auf dem Halter montiert | ||
</gallery> | </gallery> | ||
=== Der vollständige Aufbau des Gyroskop-Messsystems === | === Der vollständige Aufbau des Gyroskop-Messsystems === | ||
| Zeile 209: | Zeile 183: | ||
<gallery widths="600" heights="400"> | <gallery widths="600" heights="400"> | ||
Datei:FrontViewEncoder.jpg|600px|mini|Abb. | Datei:FrontViewEncoder.jpg|600px|mini|Abb. 27: Der Aufbau des Gyro-Messsystems (Frontansicht) | ||
Datei:Topview.jpg|750px|mini|Abb. | Datei:Topview.jpg|750px|mini|Abb. 28: Der Aufbau des Gyro-Messsystems (Draufsicht) | ||
</gallery> | </gallery> | ||
| Zeile 216: | Zeile 190: | ||
=== Programmierung === | === Programmierung === | ||
Wir haben Arduino IDE 2.1.0 verwendet, um die Komponenten zu programmieren. Zunächst haben wir die Komponenten einzeln codiert. Für GY 35 war unser erster Code, zu prüfen, ob der Impuls vom Mikrocontroller erkannt wird oder nicht. Wenn der Impuls nicht erkannt wurde, dachten wir, dass entweder der Schleifring ein Problem hat oder die GY 35-Einheit ein Problem hat. Also haben wir sie getrennt. Dann prüften wir, ob der Schleifring funktionierte. Durch einen Durchgangstest konnten wir feststellen, dass der Schleifring in Ordnung war. Das bedeutet, dass der GY 35 ein Problem hatte. Dann haben wir einen magnetischen Test für das GY 35 durchgeführt. Wir wissen, dass das GY 35 den Hall-Effekt nutzt, und wenn wir einen Magneten in seine Nähe bringen, ändert sich der Signalzustand (0 oder 1). Aber auch das hat nicht funktioniert, wir hatten nur Nullen, keine Eins. Die beiden Codes sind im nächsten Abschnitt verlinkt. Jetzt für Servo, wir hatten unsere Test-Code perfekt funktioniert. der Link ist im nächsten Abschnitt auch. Für FC 03 haben wir unseren Code, der die RPM zählen kann. Also haben wir uns entschieden, den Servo-Code und den FC 03-Code zusammenzuführen, so dass wir den Servo drehen und die Drehzahl mit dem FC 03 zählen können. Danach haben wir alle drei Code-Komponenten, GY 35, Servo und FC03 in einem einzigen Code kombiniert. Alle Codes werden in das SVN hochgeladen. | |||
=== Link zum Quelltext in SVN === | === Link zum Quelltext in SVN === | ||
==== Code für GY 35 ==== | |||
Einfacher Impulstest-Code für GY 35: [https://svn.hshl.de/svn/HSHL_Projekte/trunk/ET_Versuchsaufbauten/Gyroskop/Software/SimpleGY35Test/SimpleGY35Test.ino <code>SimpleGY35Test.ino</code>] <br> | |||
Code für die Magnetfeldprüfung für GY 35: [https://svn.hshl.de/svn/HSHL_Projekte/trunk/ET_Versuchsaufbauten/Gyroskop/Software/MagnetTestGY35/MagnetTestGY35.ino <code>MagnetTestGY35.ino</code>] <br> | |||
Code für GY 35 zur Ermittlung der RPM: [https://svn.hshl.de/svn/HSHL_Projekte/trunk/ET_Versuchsaufbauten/Gyroskop/Software/GY35rpmTest/GY35rpmTest.ino <code>GY35rpmTest.ino</code>] | |||
==== Code für Servomotor ==== | |||
Servomotor getrennt, Geschwindigkeit und Richtung: [https://svn.hshl.de/svn/HSHL_Projekte/trunk/ET_Versuchsaufbauten/Gyroskop/Software/ServoMotorContinuous/ServoMotorContinuous.ino <code>ServoMotorContinuous.ino</code>] <br> | |||
Im folgenden Abschnitt ([https://wiki.hshl.de/wiki/images/e/ea/ServoTestData.jpg Servo Motor Test Data]) finden Sie weitere Angaben zu Drehzahl und Drehrichtung. | |||
==== Code für FC 03 ==== | |||
RPM messung mit FC 03 (separat): [https://svn.hshl.de/svn/HSHL_Projekte/trunk/ET_Versuchsaufbauten/Gyroskop/Software/FC03rpmTestWheel/FC03rpmTestWheel.ino <code>FC03rpmTestWheel.ino</code>] <br> | |||
RPM messung von Servo (kombiniert): [https://svn.hshl.de/svn/HSHL_Projekte/trunk/ET_Versuchsaufbauten/Gyroskop/Software/Servo_FC03_merged/Servo_FC03_merged.ino <code>Servo_FC03_merged.ino</code>] <br> | |||
==== Alle Komponenten (Servo, GY 35 und FC 03 zusammen) ==== | |||
[https://svn.hshl.de/svn/HSHL_Projekte/trunk/ET_Versuchsaufbauten/Gyroskop/Software/Servo_FC03_GY35_Combined/Servo_FC03_GY35_Combined.ino <code>Servo_FC03_GY35_Combined.ino</code>] | |||
== Systemtest == | == Systemtest == | ||
Wir haben ein Matlab-Skript für den Systemtest des Speed Tracker-Projekts: [https://svn.hshl.de/svn/HSHL_Projekte/trunk/ET_Versuchsaufbauten/Geschwindigkeitsmessstrecke/Software/Ergebnisauswertung/berechneMessunsicherheit.m <code>berechneMessunsicherheit.m</code>]. Wir haben dieses Matlab-Skript als Referenz behalten und es für den Systemtest des Gyro-Messprojekts modifiziert. Das MATLAB-Skript für den Systemtest des Gyro-Projekts kann auf der Struktur des Speed Tracker-Projekts aufgebaut werden. Da die primären Daten, die wir betrachten, die RPM data des FC 03 und des GY 35 sind, wird sich unser Test auf den Vergleich dieser beiden Messungen hinsichtlich Konsistenz und Genauigkeit konzentrieren. Das Kernkonzept des Skripts besteht darin, die Messungen von unserem Kreiselgerät (GY 35) mit einer Referenzmessung (vom FC 03) zu vergleichen, um zu sehen, wie genau und konsistent das GY 35 ist.<br> | |||
Das modifizierte Matlab-Skript für das Gyro-Projekt: [https://svn.hshl.de/svn/HSHL_Projekte/trunk/ET_Versuchsaufbauten/Gyroskop/Software/Ergebnisauswertung_Gyro/berechneMessunsicherheit_Gyro.m <code>berechneMessunsicherheit_Gyro.m</code>] | |||
Anmerkung: <br> | |||
* Dieses Skript geht davon aus, dass wir die gemessene Drehzahl des GY-35 mit einer Referenzdrehzahl des FC03 vergleichen. | |||
* Die Daten (RPM_FC03_Ref und RPM_GY35_Meas) sind durch unsere tatsächlichen Daten zu ersetzen. Ab dem 16.08.2023 haben wir vorerst nur die RPM-Daten vom FC 03. Sobald das neue GY 35 geliefert wird, werden wir auch die Drehzahldaten des GY 35 erhalten. | |||
* Um die Messungen zu simulieren, müssen wir den Abschnitt "Simulation of the RPM measurement" auskommentieren und die Werte entsprechend anpassen. | |||
* Dieses Matlab-Skript liefert uns die Messunsicherheit für unser Gyro-Projekt, basierend auf den RPM data des GY 35 im Vergleich zu einer Referenz des FC 03. | |||
* Aus der Messung wir das vollständige Messergebnis mit Messunsicherheit Typ A (<math>u_A</math>) berechnet. Wir haben das in Matlab berechnet und die Daten in Tabelle 2 eingetragen | |||
* Referenz, Messwerte und Ergebnis werden in Tabelle 2 eingetragen. Alle Werte sind in Tabelle 2 gespeichert | |||
* Der Systemtest gilt als bestanden, wenn der Mittelwert <math>\bar{RPM_{Mess}}</math> dem Referenzwert <math>RPM_{Ref}</math> entspricht und <math>u_A <1\,\%\cdot RPM_{Ref}</math>. Der Systemtest ist erfolgreich bestanden <br> | |||
{| class="wikitable" | |||
|+ style = "text-align: left"|Tabelle 2: Systemtest für die Gyro projekt | |||
|- | |||
! # !! <math>RPM_{Soll}</math> !! <math>RPM_{Ref}</math>!! 1 !! 2 !! 3 !! 4 !! 5 !! 6 !! 7 !! 8 !! 9 !! 10 !! <math>\bar{RPM}</math> !! <math>u_A</math>!! <math>u_A <1\,\%\cdot RPM_{Ref}</math> | |||
|- | |||
| 1 || 000 || 000|| 000|| 000 || 000 || 000 || 000|| 000 || 000 || 000 || 000 ||000 ||000 || 0,00000 || ✅ | |||
|- | |||
| 2 || || || || || || || || || || || || || || || | |||
|- | |||
| 3 || || || || || || || || || || || || || || || | |||
|- | |||
| 4 || || || || || || || || || || || || || || || | |||
|- | |||
| 5 || || || || || || || || || || || || || || || | |||
|} | |||
<gallery widths="1060" heights="570"> | |||
Datei: GY35&FC03RPM.jpg|600px|mini|Abb. 29: Die RPM-Daten für das System (GY35 und FC03). | |||
</gallery> | |||
== Komponententest == | == Komponententest == | ||
==== Servo motor test ==== | ==== Servo motor test ==== | ||
Wir haben zuvor den Servomotor getestet. Wir haben verschiedene Eingaben für die Variation der Geschwindigkeit und der Drehrichtung gemacht. Unser Test war erfolgreich. Er hat bewiesen, dass der Servomotor funktioniert und sich kontinuierlich mit verschiedenen Geschwindigkeiten drehen kann. Auch unsere Welle arbeitet perfekt mit dem Servomotor zusammen. Das bedeutet, dass wir in der Lage sind, den GY35, das Rad des Encoders FC03 und den rotierenden Teil des Schleifrings zu drehen. | Wir haben zuvor den Servomotor getestet. Wir haben verschiedene Eingaben für die Variation der Geschwindigkeit und der Drehrichtung gemacht. Unser Test war erfolgreich. Er hat bewiesen, dass der Servomotor funktioniert und sich kontinuierlich mit verschiedenen Geschwindigkeiten drehen kann. Auch unsere Welle arbeitet perfekt mit dem Servomotor zusammen. Das bedeutet, dass wir in der Lage sind, den GY35, das Rad des Encoders FC03 und den rotierenden Teil des Schleifrings zu drehen. | ||
Von unserem Test haben wir die Daten erhalten, die die Geschwindigkeit des Servos und die Richtung zeigen. | Von unserem Test haben wir [https://wiki.hshl.de/wiki/images/e/ea/ServoTestData.jpg die Daten erhalten], die die Geschwindigkeit des Servos und die Richtung zeigen. | ||
<gallery widths="600" heights="338"> | <gallery widths="600" heights="338"> | ||
Datei:ServoTestGIF.gif|600px|mini|Abb. | Datei:ServoTestGIF.gif|600px|mini|Abb. 30: Testen des Servomotors | ||
Datei:ServoTestData.jpg|600px|mini|Abb. | Datei:ServoTestData.jpg|600px|mini|Abb. 31: Daten aus dem Servotest. Zeigt die Richtung und Geschwindigkeit des Servos in Abhängigkeit von der Eingabe im Code | ||
</gallery> | </gallery> | ||
==== Slip ring test ==== | ==== Slip ring test ==== | ||
Wir haben die Durchgangsprüfung (Continuity Test) am Schleifring durchgeführt. Wir haben einen Draht mit einem Multimeter und den gleichfarbigen Draht mit der anderen Sonde des Multimeters verbunden. Auf diese Weise haben wir alle 6 Drähte des Schleifrings getestet. Für unser Projekt werden wir zwar 3 Drähte verwenden (VCC, GND und OUT), aber wir haben auch einen Kanal für den REF gemacht, falls wir ihn später einbauen. Der Schleifring ist in Ordnung. | |||
==== FC 03 test ==== | |||
Wir haben den FC03 getestet. Es hat perfekt funktioniert. Wir haben den Servo-Code mit dem FC03-Code kombiniert. Im seriellen Monitor hatten wir die RPM-Daten des Rades/Servos. | |||
<gallery widths="600" heights="338"> | |||
Datei:FC03TestGIF.gif|600px|mini|Abb. 32: Wir haben den FC03 getestet. Hier in diesem Video sehen wir die vom FC03 gemessenen RPM daten des Servos | |||
Datei:ServoFC03combined.jpg|600px|mini|Abb. 33:Mit dem FC03 gemessene Daten | |||
</gallery> | |||
==== GY 35 test ==== | ==== GY 35 test ==== | ||
Zuerst haben wir das GY 35 getestet, während es mit der Welle verbunden war. Aber wir haben keinen Impuls erhalten. Dann haben wir den Schleifring überbrückt und den GY 35 direkt an den Mikrocontroller angeschlossen, aber immer noch nichts. Dann versuchten wir eine andere Möglichkeit, den GY35 zu testen. Wir haben ihn mit dem Funduino verbunden (vcc an vcc, gnd an gnd, out an digital pin) und einen Magneten in seine Nähe gebracht. Wir erwarteten, dass sich der Wert im seriellen Monitor ändern würde, aber es passierte nichts. Da wir unseren Schleifring bereits getestet haben und er funktioniert, bedeutet das, dass wir den vorhandenen GY 35 ersetzen oder eine andere Testmethode finden müssen. Außerdem haben wir den FC03, GY35 und Servo miteinander kombiniert. Bei diesem Test war unser Ziel, die Drehzahl des Servos sowohl mit dem GY35 als auch mit dem FC03 zu messen. Aber leider können wir im Serienmonitor nur die vom FC03 gemessenen RPM daten sehen. Das GY35 funktioniert immer noch nicht. <br> | |||
== | '''Update''': GY 35 funktioniert jetzt auch. Die von GY 35 gemessenen Daten sind im Abschnitt Systemtest oben dokumentiert<br> | ||
<gallery widths="600" heights="338"> | |||
Datei:AllCombinedFinal.gif|600px|mini|Abb. 34: Das Video, in dem alle Komponenten GY35, FC03 und Servo zusammenarbeiten | |||
</gallery> | |||
== Projektunterlagen == | == Projektunterlagen == | ||
| Zeile 247: | Zeile 298: | ||
<gallery widths="1100" heights="500"> | |||
Datei: GyroGantt.jpg|600px|mini|Abb. 36: Die hellgrünen Aufgaben sind Teil der Aufgabengruppe für das Gyro-Messprojekt. Der Projektplan wird in einem Gantt-Diagramm beschrieben. | |||
</gallery> | |||
== Produktionskosten pro Einheit == | |||
# Servo motor: Tower Pro Micro Servo 9g SG90 (3 bis 5 euro ca. je nach Kaufmenge) | |||
# Gyroscope: GY 35 ENC 03-RC (3 bis 5 euro ca.) | |||
# Adafruit mini slip ring 22 mm, 6 wires: 17 bis 20 euro ca. | |||
# FC 03 (LM393) mit wheel (3 bis 5 euro ca. je nach Kaufmenge) | |||
# PCB (da wir DSpace-Controller anstelle von Mikrocontrollern/Arduino verwenden werden): 1,50 euro ca. | |||
# 3D print: 1,5 euro pro Einheit | |||
# Kabel 0,5 euro pro Einheit | |||
* Insgesamt: 29,5 bis 38,5 Euro. (Dieser Gesamtpreis ist inklusive MwSt. und Versandkosten, aber der Preis kann je nach Menge und Verfügbarkeit +/- 15% variieren) | |||
== Künftige Entwicklung: LC- und RC-Filter zur Rauschunterdrückung == | == Künftige Entwicklung: LC- und RC-Filter zur Rauschunterdrückung == | ||
| Zeile 269: | Zeile 326: | ||
== Zusammenfassung == | == Zusammenfassung == | ||
Das Messsystem mit GY 35 ist ein einzigartiges Projekt. Es besteht aus der Idee, die Daten des GY35 zu messen und sie mit den Daten des FC03 zu vergleichen. Der Servomotor ist die Antriebseinheit, die die rotierenden Teile des Systems antreibt. Da wir die Modifikation/den Entwurf der Komponenten besprochen haben, möchten wir an dieser Stelle allen danken, die auf unterschiedliche Weise direkt zu dieser Arbeit beigetragen haben. Dank an Herrn Ebmeyer und Professor Schneider. Auch dem Elektroniklabor im 2. Stock für den 3D-Druck, Herrn Beck und Herrn Gonzales. Danke auch an Herrn Raza, Herrn Dominik für den Zugang zum Labor. Herrn Olaf für die Geräte zur Aufnahme. Das Projekt bestand aus verschiedenen Teilen, und wir haben es geschafft, sie alle zu erfüllen. Eine der Herausforderungen war die Konstruktion der Welle und der anschließende Druck. Für die zukünftige Entwicklung haben wir auch Verbesserungsvorschläge gemacht. Darüber hinaus ist das Projekt eine einzigartige Kombination aus der Entwicklung neuer Ideen, der Überwindung von Hindernissen und der Kombination von schnellen, stabilen Entscheidungen und ständiger Weiterentwicklung. | |||
== Literature == | == Literature == | ||
Aktuelle Version vom 13. Dezember 2023, 01:51 Uhr

Author: ....
Art: Praxissemester
Dauer: 02.05.2023 - 21.08.2023
Betreuer: Prof. Dr.-Ing Ulrich Schneider
Einleitung
Das Gyroskop-Projekt wird es uns ermöglichen, die Daten einer kontinuierlichen Drehung eines Gyroskops zu erfassen und sie zur Analyse an unsere Steuereinheit zu senden. In diesem Projekt werden wir das Gyroskop drehen und seine Daten über einen Schleifring übertragen. Das Hauptaugenmerk des Projekts liegt darauf, die Daten an das DS1104 R&D Controller Board zu senden. Und dafür brauchen wir ein robustes System, das einen Schleifring und einen Encoder enthält. Die größte Herausforderung beim Aufbau des Systems ist die Hardware-Montage. Wir werden uns also mehr darauf konzentrieren.
Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1 | Ein Haltebereich für PCB zwischen der Hauptstruktur und der Gyro-Struktur | Marc Ebmeyer | 27.07.2023 | Rafsan | 07.08.2023 |
| 2 | Ein Servomotor (SG 90) zum Drehen des Gyroskops, des Rades des Inkrementalgebers und des Schleifrings | Marc Ebmeyer | 27.07.2023 | Rafsan | 09.08.2023 |
| 3 | Einem Inkrementalgeber (FC 03) zur Messung der Drehung des Servomotors (SG 90) und des Gyro (GY 35) | Marc Ebmeyer | 27.07.2023 | Rafsan | 14.08.2023 |
| 4 | Ein Gyro (GY 35), der in der gleichen Achse wie das Servo und der Schleifring platziert ist und über einen Draht mit dem Schleifring verbunden ist | Marc Ebmeyer | 27.07.2023 | Rafsan | 09.08.2023 |
| 5 | Ein Schleifring (SN M022A-06), der über eine Welle mit dem Servo verbunden ist, um die Daten vom Gyro zu übertragen | Marc Ebmeyer | 27.07.2023 | Rafsan | 09.08.2023 |
Funktionaler Systementwurf/Technischer Systementwurf
-
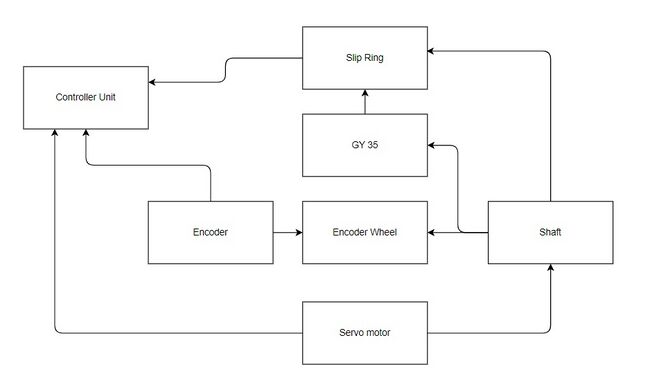 Abb. 2: Dieser Entwurf zeigt die Wechselwirkungen zwischen den Komponenten des Systems
Abb. 2: Dieser Entwurf zeigt die Wechselwirkungen zwischen den Komponenten des Systems -
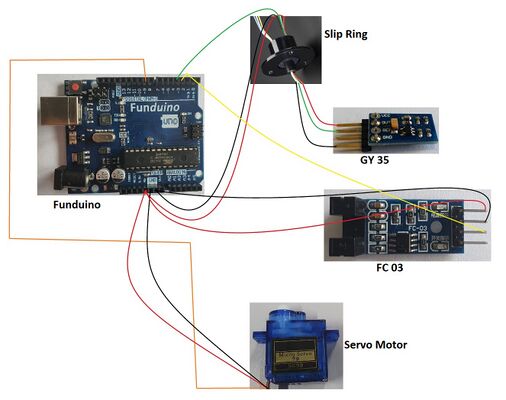 Abb. 3: Dieses Diagramm zeigt die Verbindung zwischen den Schaltelementen
Abb. 3: Dieses Diagramm zeigt die Verbindung zwischen den Schaltelementen


Komponentenspezifikation (Elektronische Komponenten)
Sensor
GY-35-RC one-axial Gyroscope/ Analog ENC-03RC
Der Sensor, den wir verwenden werden, hat die Modellnummer GY-35. Auf ihm ist ein ENC-03RC-Chip montiert. Der GY-35 ist ein einachsiges Gyromodul, das heißt, ein Modul kann nur eine Achse messen. Die Spannungsversorgung beträgt 3 bis 5 V. Die Größe beträgt 10mm × 17.5mm [1] [2]. Eine Alternative zum Sensor GY 35 kann der Sensor MPU 6050 oder GY 521 sein.
-
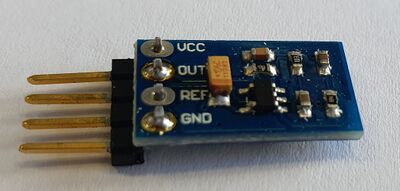 Abb. 4: GY 35 ENC-03RC
Abb. 4: GY 35 ENC-03RC -
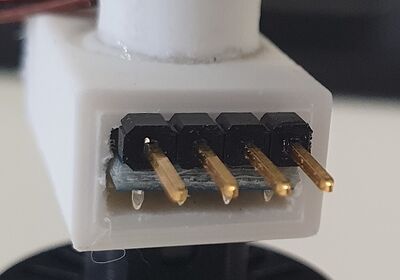 Abb. 5: Installierte GY 35 im System
Abb. 5: Installierte GY 35 im System


Inkrementalgeber/ optischer Geschwindigkeitsmesser (FC 03)
Wir haben einen Encoder-Drehzahlsensor verwendet. Er besteht aus dem Chipsatz und dem Rad. Das Hauptziel des Encoders in unserem System ist es, die Geschwindigkeit des Servomotors zu messen. Das Rad ist oben auf dem Servomotor befestigt, und der Chip des Encoders ist auf einem Halter an der Seite des Rads montiert. Das von uns verwendete Modell ist FC 03 [3]
-
 Abb. 6: Encoder Geschwindigkeit Optische Kopplung FC-03 Sensor
Abb. 6: Encoder Geschwindigkeit Optische Kopplung FC-03 Sensor -
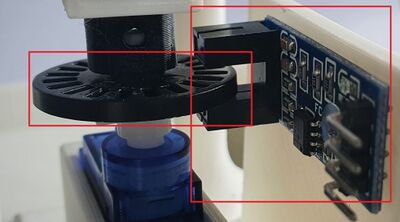 Abb. 7: Installierte FC 03 mit Rad im System
Abb. 7: Installierte FC 03 mit Rad im System


Servo motor SG 90
Wir haben den normalen Servomotor, der normalerweise in Arduino-Projekten verwendet wird, so verändert, dass er sich kontinuierlich um 360 Grad drehen kann. Wir verwenden Tower Pro micro servo 9g SG90 [4] . Der Änderungsprozess ermöglicht es uns, das Servo kontinuierlich in beide Richtungen zu drehen. Wir können auch die Geschwindigkeit kontrollieren [5]
-
 Abb. 8: Servomotor 9g SG90 (von uns modifiziert)
Abb. 8: Servomotor 9g SG90 (von uns modifiziert) -
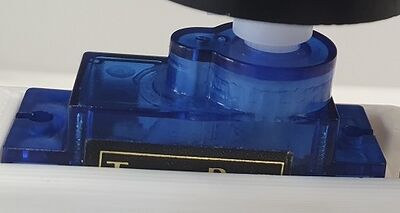 Abb. 9: Installierte Servomotor 9g SG90 im System
Abb. 9: Installierte Servomotor 9g SG90 im System


Slip ring SRC022A-6
Für unser Messsystem ist es sehr wichtig, dass das GY 35 kontinuierlich gedreht wird. Dafür haben wir den Servomotor modifiziert. Aber dann standen wir vor einer Herausforderung. Da der GY 35 mit der Steuereinheit verbunden ist, würde eine kontinuierliche Drehung die Drähte, die mit der Steuereinheit (PCB/Arduino) verbunden sind, verwickeln. Um das Problem zu lösen, haben wir einen Schleifring installiert. Dieser Schleifring hat 6 Drähte auf beiden Seiten, was bedeutet, dass 4 verschiedene Arten von Anschlüssen des GY 35 leicht mit einer der beiden Seiten verbunden werden können. Wir haben die dünnere, drehbare Seite des Schleifrings gewählt, um den GY 35 anzuschließen. Die maximale Stromstärke, die er übertragen kann, beträgt 2A. Außerdem kann er sich mit bis zu 300 rpm drehen [6].
-
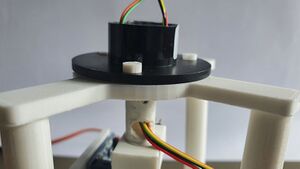 Abb. 10: Installierte Schleifring im System
Abb. 10: Installierte Schleifring im System

Controller unit ( DS1104 R&D Controller Board oder Mikrokontroller)
In diesem Projekt werden wir zunächst einen Mikrocontroller und später eine Controller Board verwenden, die alle für das System benötigten Steuereinheiten enthält. Wir verwenden Funduino Uno [7].
-
 Abb. 11: Der Mikrocontroller Funduino zum Testen des Systems
Abb. 11: Der Mikrocontroller Funduino zum Testen des Systems

Umsetzung (Hardware)
Die Systemgrundlage
Die Hauptbasis des Systems ist der Boden, der alle Komponenten trägt. Sie ist in zwei Teile unterteilt, einer ist der Haltebereich für Servo, Gyro, Encoder und Schleifring. Der andere ist die Erweiterung, die die Leiterplatte aufnimmt. Die Leiterplatte fungiert als Hauptsteuergerät. Wir können auch einen Arduino anstelle der Platine einsetzen.
Der Base
Der Boden ist der Bereich, in dem sich die Komponenten befinden
PCB-Halter-Verlängerung
Wir haben den vorgesehenen PCB-Erweiterungsbereich. Dieser überbrückt den Leiterplattenhalter und den Hauptkörper des Systems.
-
 Abb. 12: Der wichtigste Aufbewahrungsort für alle Komponenten
Abb. 12: Der wichtigste Aufbewahrungsort für alle Komponenten -
 Abb. 13: Die Verlängerung der Hauptstruktur, die die Leiterplatte hält
Abb. 13: Die Verlängerung der Hauptstruktur, die die Leiterplatte hält


Schleifring-Halter
Der Schleifringhalter ist so konzipiert, dass er den Schleifring auf dem Servo und dem Gy35 in der gleichen Achse hält. Er hat 3 Flügel, die ihn mit der Säule verbinden und einen Haltebereich für den Schleifring.
Tragsäule für Schleifringhalter
Wir haben drei Stützsäulen auf dem Boden montiert. Sie stützen den Schleifringhalter.
-
 Abb. 14: Der Haltebereich für den Schleifring
Abb. 14: Der Haltebereich für den Schleifring -
 Abb. 15: Säule zur Unterstützung des Schleifringhalters
Abb. 15: Säule zur Unterstützung des Schleifringhalters -
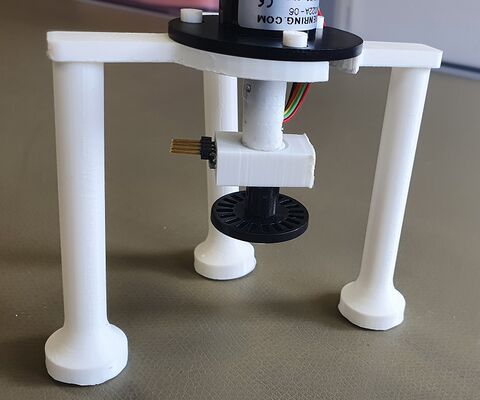 Abb. 16: Die Verbindung zwischen Schleifringhalter und Säule und der Welle
Abb. 16: Die Verbindung zwischen Schleifringhalter und Säule und der Welle



Servomotor (SG 90) Halterung
Wir haben eine Halterung für das Servo, es ist auf dem Boden montiert. Er hat einen Platz für die Drähte, die aus dem Servo kommen. Außerdem gibt es ein kleines Teil zur Stabilisierung des Motors. Bei der Konstruktion des Servohalters mussten wir die genauen Maße berücksichtigen, denn wenn der Halter nicht stabil ist, wird unser ganzes System keine gute Leistung erbringen.
-
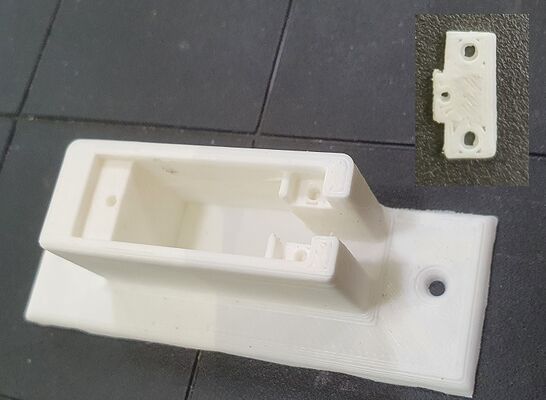 Abb. 17: Die Halterung für den Servomotor
Abb. 17: Die Halterung für den Servomotor -
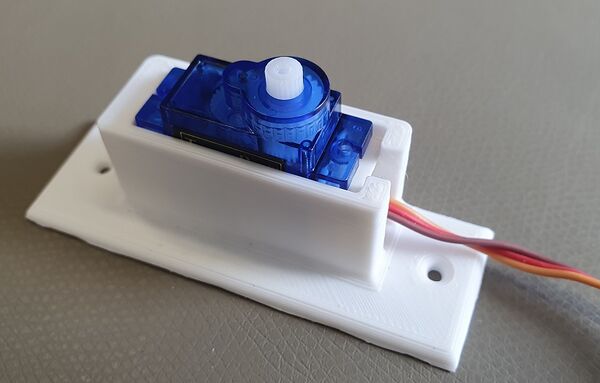 Abb. 18: Montierter Servomotor im Inneren des Halters
Abb. 18: Montierter Servomotor im Inneren des Halters


Der Schaft
Die Welle ist ein einzigartiges Design, um die Verbindung zwischen Schleifring, Gy35, Encoder und Servo herzustellen. Sie besteht aus drei Teilen.
Schleifring- und Gyroskophalter-Anschluss
Der erste Teil ist ein abgerundetes zylinderförmiges Verbindungsstück zwischen dem dünneren Ende des Schleifrings und dem Gy35-Halter. Seine Hauptfunktion besteht darin, den rotierenden Teil des Schleifrings zu drehen. Es hat auch ein Vakuum im Inneren für die Drähte, die aus dem Schleifring kommen. Das andere Ende dieses Teils ist mit dem kastenförmigen GY 35-Halter verbunden.
Gyroskop (GY 35) Halterung
Der mittlere Teil der Welle ist der kastenförmige Halter. Er hat zwei Aufgaben. Zum einen hält er den GY 35 auf der gleichen Achse wie das Servo und zum anderen dient er als Brücke zwischen dem Schleifring und dem Servo
-
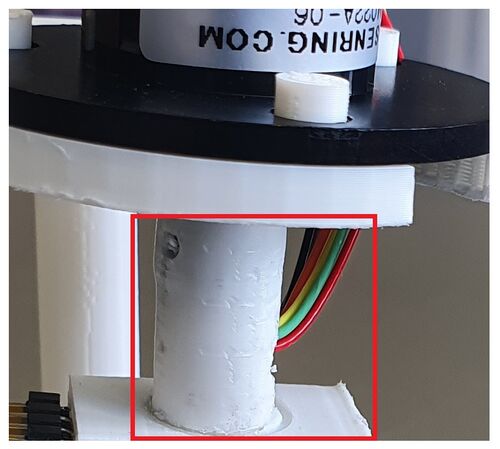 Abb. 19: Der rot markierte Bereich zeigt den Stecker und die Kabel, die durch ihn gehen
Abb. 19: Der rot markierte Bereich zeigt den Stecker und die Kabel, die durch ihn gehen -
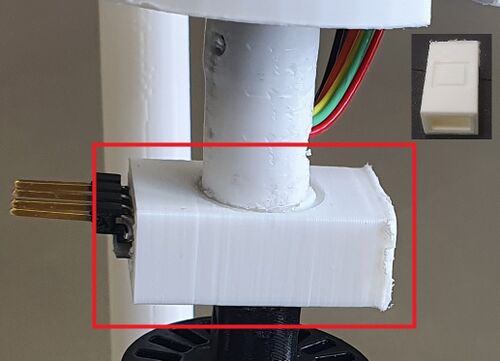 Abb. 20: Die rot markierte Kastenform, die den Halter GY 35 kennzeichnet
Abb. 20: Die rot markierte Kastenform, die den Halter GY 35 kennzeichnet -
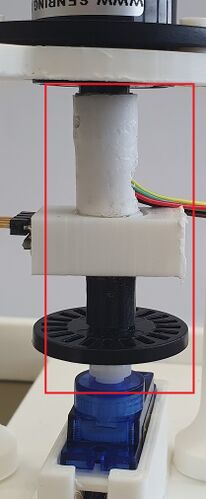 Abb. 21: Der rot markierte Bereich zeigt die gesamte Welle
Abb. 21: Der rot markierte Bereich zeigt die gesamte Welle



Servo- und Gyroskophalter-Anschluss
Der untere Teil der Welle ist die Verbindung zwischen dem kastenförmigen GY 35 Halter und dem darunter liegenden Servo. Dieser Teil hat ebenfalls zwei Unterteile. Das eine ist mit dem Kopf des Servomotors verbunden. Dieses Teil geht auch durch das Mittelloch des Geberrades (FC 03). Dann gibt es noch ein zweites Teil. Es ist mit dem GY 35 Halter verbunden und der untere Teil geht in diesen hinein.
-
 Abb. 22: Der obere Teil des dritten Steckers, der den GY 35-Halter und den unteren Teil, der das Geberrad hält, verbindet
Abb. 22: Der obere Teil des dritten Steckers, der den GY 35-Halter und den unteren Teil, der das Geberrad hält, verbindet -
 Abb. 23: Der untere Teil des 3. Teils der Welle. Er enthält das Geberrad und ist mit dem Servokopf verbunden
Abb. 23: Der untere Teil des 3. Teils der Welle. Er enthält das Geberrad und ist mit dem Servokopf verbunden -
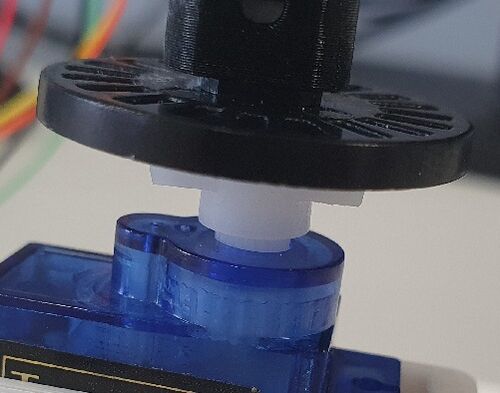 Abb. 24: Das Servo und der untere Anschluss der Welle
Abb. 24: Das Servo und der untere Anschluss der Welle



Inkrementalgeber (FC 03) Halterung
Wir haben einen Halter für den Inkrementalgeber (FC 03) entworfen. Es ist eine Wand geformt. Wir haben den FC 03 mit einer Schraube an der Wand befestigt. Die Wand selbst wird mit dem Sockel des Systems verschraubt. Wir haben die Wand flexibel gehalten, so dass wir die Position verändern können.
-
 Abb. 25: Der Halter für den Inkrementalgeber FC 03
Abb. 25: Der Halter für den Inkrementalgeber FC 03 -
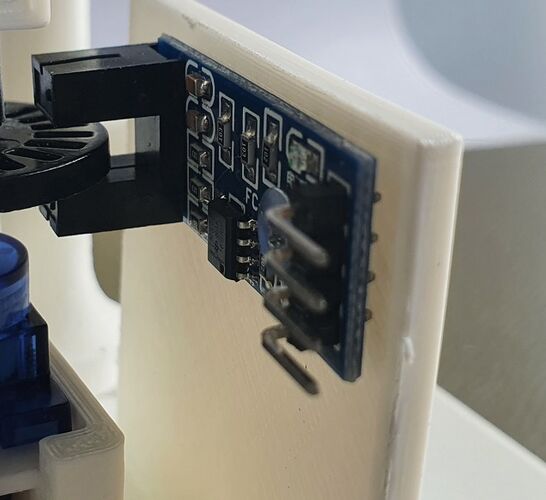 Abb. 26: Der FC 03 ist auf dem Halter montiert
Abb. 26: Der FC 03 ist auf dem Halter montiert


Der vollständige Aufbau des Gyroskop-Messsystems
Dies ist das System nach der Fertigstellung. Wir können sehen, dass alle Teile, die wir oben beschrieben haben, angeschlossen und installiert sind. Dieses Bild wurde nach der Installation der Hardware aufgenommen. Hier sind die Drähte nicht angeschlossen. Das Bild der angeschlossenen Kabel wird im Wiki hochgeladen, nachdem der Software- und Programmierteil abgeschlossen ist.
-
 Abb. 27: Der Aufbau des Gyro-Messsystems (Frontansicht)
Abb. 27: Der Aufbau des Gyro-Messsystems (Frontansicht) -
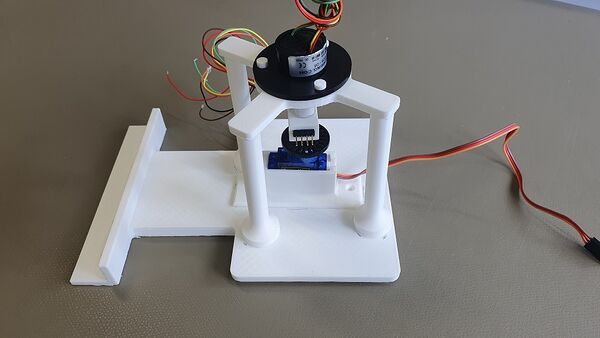 Abb. 28: Der Aufbau des Gyro-Messsystems (Draufsicht)
Abb. 28: Der Aufbau des Gyro-Messsystems (Draufsicht)


Umsetzung (Software)
Programmierung
Wir haben Arduino IDE 2.1.0 verwendet, um die Komponenten zu programmieren. Zunächst haben wir die Komponenten einzeln codiert. Für GY 35 war unser erster Code, zu prüfen, ob der Impuls vom Mikrocontroller erkannt wird oder nicht. Wenn der Impuls nicht erkannt wurde, dachten wir, dass entweder der Schleifring ein Problem hat oder die GY 35-Einheit ein Problem hat. Also haben wir sie getrennt. Dann prüften wir, ob der Schleifring funktionierte. Durch einen Durchgangstest konnten wir feststellen, dass der Schleifring in Ordnung war. Das bedeutet, dass der GY 35 ein Problem hatte. Dann haben wir einen magnetischen Test für das GY 35 durchgeführt. Wir wissen, dass das GY 35 den Hall-Effekt nutzt, und wenn wir einen Magneten in seine Nähe bringen, ändert sich der Signalzustand (0 oder 1). Aber auch das hat nicht funktioniert, wir hatten nur Nullen, keine Eins. Die beiden Codes sind im nächsten Abschnitt verlinkt. Jetzt für Servo, wir hatten unsere Test-Code perfekt funktioniert. der Link ist im nächsten Abschnitt auch. Für FC 03 haben wir unseren Code, der die RPM zählen kann. Also haben wir uns entschieden, den Servo-Code und den FC 03-Code zusammenzuführen, so dass wir den Servo drehen und die Drehzahl mit dem FC 03 zählen können. Danach haben wir alle drei Code-Komponenten, GY 35, Servo und FC03 in einem einzigen Code kombiniert. Alle Codes werden in das SVN hochgeladen.
Link zum Quelltext in SVN
Code für GY 35
Einfacher Impulstest-Code für GY 35: SimpleGY35Test.ino
Code für die Magnetfeldprüfung für GY 35: MagnetTestGY35.ino
Code für GY 35 zur Ermittlung der RPM: GY35rpmTest.ino
Code für Servomotor
Servomotor getrennt, Geschwindigkeit und Richtung: ServoMotorContinuous.ino
Im folgenden Abschnitt (Servo Motor Test Data) finden Sie weitere Angaben zu Drehzahl und Drehrichtung.
Code für FC 03
RPM messung mit FC 03 (separat): FC03rpmTestWheel.ino
RPM messung von Servo (kombiniert): Servo_FC03_merged.ino
Alle Komponenten (Servo, GY 35 und FC 03 zusammen)
Systemtest
Wir haben ein Matlab-Skript für den Systemtest des Speed Tracker-Projekts: berechneMessunsicherheit.m. Wir haben dieses Matlab-Skript als Referenz behalten und es für den Systemtest des Gyro-Messprojekts modifiziert. Das MATLAB-Skript für den Systemtest des Gyro-Projekts kann auf der Struktur des Speed Tracker-Projekts aufgebaut werden. Da die primären Daten, die wir betrachten, die RPM data des FC 03 und des GY 35 sind, wird sich unser Test auf den Vergleich dieser beiden Messungen hinsichtlich Konsistenz und Genauigkeit konzentrieren. Das Kernkonzept des Skripts besteht darin, die Messungen von unserem Kreiselgerät (GY 35) mit einer Referenzmessung (vom FC 03) zu vergleichen, um zu sehen, wie genau und konsistent das GY 35 ist.
Das modifizierte Matlab-Skript für das Gyro-Projekt: berechneMessunsicherheit_Gyro.m
Anmerkung:
- Dieses Skript geht davon aus, dass wir die gemessene Drehzahl des GY-35 mit einer Referenzdrehzahl des FC03 vergleichen.
- Die Daten (RPM_FC03_Ref und RPM_GY35_Meas) sind durch unsere tatsächlichen Daten zu ersetzen. Ab dem 16.08.2023 haben wir vorerst nur die RPM-Daten vom FC 03. Sobald das neue GY 35 geliefert wird, werden wir auch die Drehzahldaten des GY 35 erhalten.
- Um die Messungen zu simulieren, müssen wir den Abschnitt "Simulation of the RPM measurement" auskommentieren und die Werte entsprechend anpassen.
- Dieses Matlab-Skript liefert uns die Messunsicherheit für unser Gyro-Projekt, basierend auf den RPM data des GY 35 im Vergleich zu einer Referenz des FC 03.
- Aus der Messung wir das vollständige Messergebnis mit Messunsicherheit Typ A () berechnet. Wir haben das in Matlab berechnet und die Daten in Tabelle 2 eingetragen
- Referenz, Messwerte und Ergebnis werden in Tabelle 2 eingetragen. Alle Werte sind in Tabelle 2 gespeichert
- Der Systemtest gilt als bestanden, wenn der Mittelwert dem Referenzwert entspricht und . Der Systemtest ist erfolgreich bestanden
| # | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 000 | 000 | 000 | 000 | 000 | 000 | 000 | 000 | 000 | 000 | 000 | 000 | 000 | 0,00000 | ✅ |
| 2 | |||||||||||||||
| 3 | |||||||||||||||
| 4 | |||||||||||||||
| 5 |
-
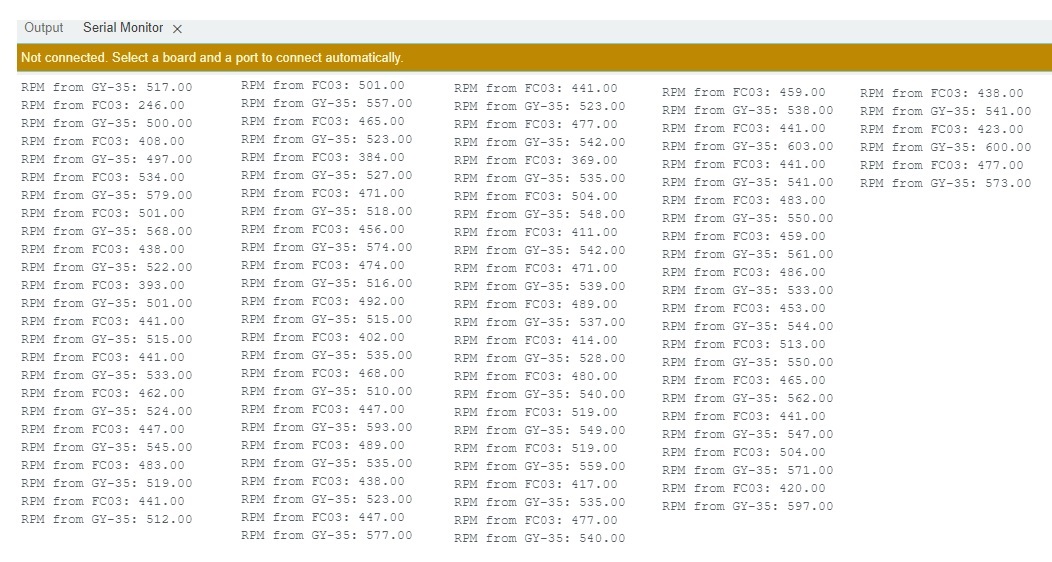 Abb. 29: Die RPM-Daten für das System (GY35 und FC03).
Abb. 29: Die RPM-Daten für das System (GY35 und FC03).

Komponententest
Servo motor test
Wir haben zuvor den Servomotor getestet. Wir haben verschiedene Eingaben für die Variation der Geschwindigkeit und der Drehrichtung gemacht. Unser Test war erfolgreich. Er hat bewiesen, dass der Servomotor funktioniert und sich kontinuierlich mit verschiedenen Geschwindigkeiten drehen kann. Auch unsere Welle arbeitet perfekt mit dem Servomotor zusammen. Das bedeutet, dass wir in der Lage sind, den GY35, das Rad des Encoders FC03 und den rotierenden Teil des Schleifrings zu drehen. Von unserem Test haben wir die Daten erhalten, die die Geschwindigkeit des Servos und die Richtung zeigen.
-
 Abb. 30: Testen des Servomotors
Abb. 30: Testen des Servomotors -
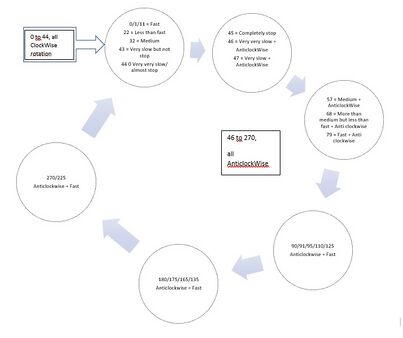 Abb. 31: Daten aus dem Servotest. Zeigt die Richtung und Geschwindigkeit des Servos in Abhängigkeit von der Eingabe im Code
Abb. 31: Daten aus dem Servotest. Zeigt die Richtung und Geschwindigkeit des Servos in Abhängigkeit von der Eingabe im Code


Slip ring test
Wir haben die Durchgangsprüfung (Continuity Test) am Schleifring durchgeführt. Wir haben einen Draht mit einem Multimeter und den gleichfarbigen Draht mit der anderen Sonde des Multimeters verbunden. Auf diese Weise haben wir alle 6 Drähte des Schleifrings getestet. Für unser Projekt werden wir zwar 3 Drähte verwenden (VCC, GND und OUT), aber wir haben auch einen Kanal für den REF gemacht, falls wir ihn später einbauen. Der Schleifring ist in Ordnung.
FC 03 test
Wir haben den FC03 getestet. Es hat perfekt funktioniert. Wir haben den Servo-Code mit dem FC03-Code kombiniert. Im seriellen Monitor hatten wir die RPM-Daten des Rades/Servos.
-
 Abb. 32: Wir haben den FC03 getestet. Hier in diesem Video sehen wir die vom FC03 gemessenen RPM daten des Servos
Abb. 32: Wir haben den FC03 getestet. Hier in diesem Video sehen wir die vom FC03 gemessenen RPM daten des Servos -
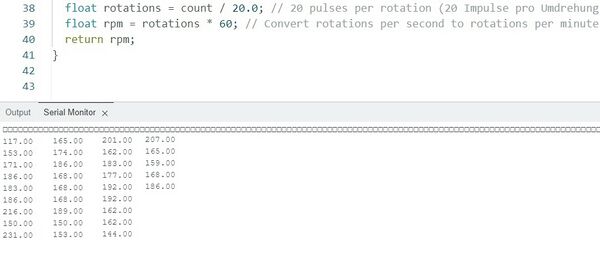 Abb. 33:Mit dem FC03 gemessene Daten
Abb. 33:Mit dem FC03 gemessene Daten


GY 35 test
Zuerst haben wir das GY 35 getestet, während es mit der Welle verbunden war. Aber wir haben keinen Impuls erhalten. Dann haben wir den Schleifring überbrückt und den GY 35 direkt an den Mikrocontroller angeschlossen, aber immer noch nichts. Dann versuchten wir eine andere Möglichkeit, den GY35 zu testen. Wir haben ihn mit dem Funduino verbunden (vcc an vcc, gnd an gnd, out an digital pin) und einen Magneten in seine Nähe gebracht. Wir erwarteten, dass sich der Wert im seriellen Monitor ändern würde, aber es passierte nichts. Da wir unseren Schleifring bereits getestet haben und er funktioniert, bedeutet das, dass wir den vorhandenen GY 35 ersetzen oder eine andere Testmethode finden müssen. Außerdem haben wir den FC03, GY35 und Servo miteinander kombiniert. Bei diesem Test war unser Ziel, die Drehzahl des Servos sowohl mit dem GY35 als auch mit dem FC03 zu messen. Aber leider können wir im Serienmonitor nur die vom FC03 gemessenen RPM daten sehen. Das GY35 funktioniert immer noch nicht.
Update: GY 35 funktioniert jetzt auch. Die von GY 35 gemessenen Daten sind im Abschnitt Systemtest oben dokumentiert
-
 Abb. 34: Das Video, in dem alle Komponenten GY35, FC03 und Servo zusammenarbeiten
Abb. 34: Das Video, in dem alle Komponenten GY35, FC03 und Servo zusammenarbeiten

Projektunterlagen
Projektplan
-
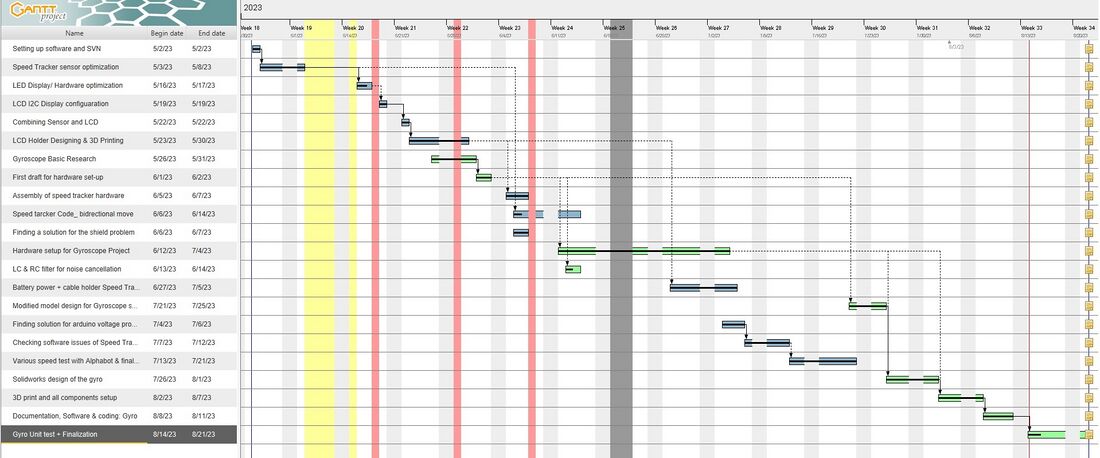 Abb. 36: Die hellgrünen Aufgaben sind Teil der Aufgabengruppe für das Gyro-Messprojekt. Der Projektplan wird in einem Gantt-Diagramm beschrieben.
Abb. 36: Die hellgrünen Aufgaben sind Teil der Aufgabengruppe für das Gyro-Messprojekt. Der Projektplan wird in einem Gantt-Diagramm beschrieben.

{kind=link}
Produktionskosten pro Einheit
- Servo motor: Tower Pro Micro Servo 9g SG90 (3 bis 5 euro ca. je nach Kaufmenge)
- Gyroscope: GY 35 ENC 03-RC (3 bis 5 euro ca.)
- Adafruit mini slip ring 22 mm, 6 wires: 17 bis 20 euro ca.
- FC 03 (LM393) mit wheel (3 bis 5 euro ca. je nach Kaufmenge)
- PCB (da wir DSpace-Controller anstelle von Mikrocontrollern/Arduino verwenden werden): 1,50 euro ca.
- 3D print: 1,5 euro pro Einheit
- Kabel 0,5 euro pro Einheit
- Insgesamt: 29,5 bis 38,5 Euro. (Dieser Gesamtpreis ist inklusive MwSt. und Versandkosten, aber der Preis kann je nach Menge und Verfügbarkeit +/- 15% variieren)
Künftige Entwicklung: LC- und RC-Filter zur Rauschunterdrückung
Wenn der GY35-Sensor mit dem Schleifring verbunden wird, erwarten wir Geräusche (hohe und niedrige Frequenzen), die das System stören können. Um sie zu beseitigen, planen wir die Einführung eines Geräuschunterdrückungssystems. Unser anfänglicher Plan ist es, eine Schaltung oder ein Untersystem mit einem Satz von 3 Kondensatoren und 2 Induktoren auf der GY35-Schleifring-Seite des Hauptsystems zu bauen. Wir werden auch einen ähnlichen Aufbau auf der Schleifring- Arduino Seite des Systems machen. Diese beiden Sätze von Entkopplungskondensatoren werden uns helfen, das Rauschen zu reduzieren und die Stromversorgung zu stabilisieren. Jeder Kondensatorensatz besteht aus einem 0,1 µF, einem 1 µF und einem 10 µF Kondensator. Wir werden Keramikkondensatoren verwenden. Der Kondensator mit dem niedrigsten Wert (0,1 µF) wird in der Nähe des GY35 platziert, um hochfrequente Störungen herauszufiltern. Dann der mittlere (1 µF) und der letzte (10 µF), um das niederfrequente Rauschen herauszufiltern. Wahrscheinlich werden wir die üblichen Keramikkondensatoren verwenden.
Dann haben wir die Spule, zwei davon. Sie werden die hochfrequenten Geräusche zusammen mit den Kondensatoren abstoßen. So entsteht ein LC-Filter zur Rauschunterdrückung. Zunächst wollen wir unser System mit Induktivitäten verschiedener Werte (z. B. zwischen 10 und 100 µH) testen. Diese werden in Reihe mit der Vcc und dem GND geschaltet. Wir schlagen vor, Ferritperlen zu verwenden, da sie sich gut für die Unterdrückung von Hochfrequenzrauschen eignen.
Ein weiterer wichtiger Aspekt ist die Implementierung eines RC-Low-Level-Filters. Es wird das Rauschen vom analogen Ausgang des GY35 beseitigen. Dafür haben wir hauptsächlich ein Paar von ??KΩ-Widerständen und ??nF-Kondensatoren (ca.) gewählt [wir haben die Grenzfrequenzberechnung verwendet, Grenzfrequenz = 1/(2πRC)] oder [Messwert] KΩ-Widerstand und [Messwert] nF-Kondensator (ca.) Diese Werte des Widerstands und des Kondensators des RC-Filters hängen von der Grenzfrequenz ab, die wir erreichen müssen. Für den Kondensator im RC-Filter könnten wir Folienkondensatoren verwenden, da unser Ziel die Filterung des Signals ist und Keramikkondensatoren eine gute Leistung haben.
Zusammenfassung
Das Messsystem mit GY 35 ist ein einzigartiges Projekt. Es besteht aus der Idee, die Daten des GY35 zu messen und sie mit den Daten des FC03 zu vergleichen. Der Servomotor ist die Antriebseinheit, die die rotierenden Teile des Systems antreibt. Da wir die Modifikation/den Entwurf der Komponenten besprochen haben, möchten wir an dieser Stelle allen danken, die auf unterschiedliche Weise direkt zu dieser Arbeit beigetragen haben. Dank an Herrn Ebmeyer und Professor Schneider. Auch dem Elektroniklabor im 2. Stock für den 3D-Druck, Herrn Beck und Herrn Gonzales. Danke auch an Herrn Raza, Herrn Dominik für den Zugang zum Labor. Herrn Olaf für die Geräte zur Aufnahme. Das Projekt bestand aus verschiedenen Teilen, und wir haben es geschafft, sie alle zu erfüllen. Eine der Herausforderungen war die Konstruktion der Welle und der anschließende Druck. Für die zukünftige Entwicklung haben wir auch Verbesserungsvorschläge gemacht. Darüber hinaus ist das Projekt eine einzigartige Kombination aus der Entwicklung neuer Ideen, der Überwindung von Hindernissen und der Kombination von schnellen, stabilen Entscheidungen und ständiger Weiterentwicklung.
Literature
- ↑ https://www.christians-shop.de/GY-35-RC-one-axial-Gyroscope-analogue-ENC-03RC
- ↑ https://www.lxxtech.com/gy-35-rc-axis-gyroscope-analog-gyro-module-enc-03rc-module-p299.html
- ↑ https://techmaze.romman.store/product/99187844
- ↑ https://datasheetspdf.com/pdf/791970/TowerPro/SG90/1
- ↑ https://www.youtube.com/watch?v=JhHSXCLsN4k&t=13s
- ↑ https://www.adafruit.com/product/736#description
- ↑ https://funduinoshop.com/en/electronic-modules/other/microcontroller/873/funduino-uno-r3-microcontroller-arduino-compatible/
→ zurück zum Hauptartikel: Messaufbauten mit Arduino