Komponenten eines AMR: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (6 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
Dieser Artikel beschäftigt sich mit den Komponenten eines AMR (autonomer mobiler Roboter) auf Basis eines 1:10 Modellfahrzeugs. | Dieser Artikel beschäftigt sich mit den Komponenten eines AMR (autonomer mobiler Roboter) auf Basis eines 1:10 Modellfahrzeugs. | ||
= Architekturübersicht = | |||
= Hardware-Komponenten = | |||
== Fernbedienungsempfänger == | |||
Diese Beschreibung beschränkt sich zunächst auf dem Fernbedienungsempfänger '''Futaba F143F 50MHz FM'''. Nichtsdestotrotz können die hier enthaltene Informationen auf andere Empfänger für die gleiche Anwendung übertragen werden. | Diese Beschreibung beschränkt sich zunächst auf dem Fernbedienungsempfänger '''Futaba F143F 50MHz FM'''. Nichtsdestotrotz können die hier enthaltene Informationen auf andere Empfänger für die gleiche Anwendung übertragen werden. | ||
| Zeile 14: | Zeile 11: | ||
=== Anschlüsse === | |||
Die Stromversorgung des Empfängers erfolgt über den Fahrtenregler, der wiederum die Versorgung von Fahrakku entnimmt. Gemessen ist ein Versorgungspegel von 6V. | Die Stromversorgung des Empfängers erfolgt über den Fahrtenregler, der wiederum die Versorgung von Fahrakku entnimmt. Gemessen ist ein Versorgungspegel von 6V. | ||
| Zeile 25: | Zeile 22: | ||
=== Lenk-Signal === | |||
Das Lenksignal wird als PWM-Signal vom Empfänger an dem Lenkservo gegeben. Das Signal ist wie folgend beschaffen: | Das Lenksignal wird als PWM-Signal vom Empfänger an dem Lenkservo gegeben. Das Signal ist wie folgend beschaffen: | ||
| Zeile 69: | Zeile 66: | ||
=== Gas-Signal === | |||
Ähnlich wie das Lenksignal wird das Gassignal in einem PWM-Signal moduliert. Das Signal hat folgende Eigenschaften: | Ähnlich wie das Lenksignal wird das Gassignal in einem PWM-Signal moduliert. Das Signal hat folgende Eigenschaften: | ||
| Zeile 112: | Zeile 109: | ||
</gallery> | </gallery> | ||
=== Signalschwankungen === | |||
Die oben dargestellten Pulsbreiten der Signale schwanken bei konstanter Betätigung der Fernbedienung um ca. 65µs. | Die oben dargestellten Pulsbreiten der Signale schwanken bei konstanter Betätigung der Fernbedienung um ca. 65µs. | ||
<gallery> | <gallery> | ||
| Zeile 118: | Zeile 115: | ||
</gallery> | </gallery> | ||
== Software-Komponenten = | |||
== Lenkservo == | |||
{| class="wikitable" | |||
! Pin !! colspan="2" | Farbe !! Funktion | |||
|- | |||
| 1 | |||
! style="background-color: brown;" | | |||
| Braun | |||
| GND | |||
|- | |||
| 2 | |||
! style="background-color: red;" | | |||
| Rot | |||
| Vcc | |||
|- | |||
| 3 | |||
! style="background-color: white;" | | |||
| Weiß | |||
| PWM-Eingang | |||
|} | |||
== Fahrtenregler == | |||
{| class="wikitable" | |||
! Pin !! colspan="2" | Farbe !! Funktion | |||
|- | |||
| 1 | |||
! style="background-color: black;" | | |||
| Schwarz | |||
| GND | |||
|- | |||
| 2 | |||
! style="background-color: red;" | | |||
| Rot | |||
| Vcc | |||
|- | |||
| 3 | |||
! style="background-color: white;" | | |||
| Weiß | |||
| PWM-Eingang | |||
|} | |||
== Motor == | |||
=== Anschlüsse === | |||
Der Motor verfügt über zwei Anschlüsse. Der erste Anschluss dient zur Steuerung der drei Phasen des Motors '''A, B und C''' seitens des Fahrtenregler. Da diese Leitungen hohe Ströme führen, ist äußerste Vorsicht bei der Umgang mit denen geboten. Der zweite Anschluss ist der Sensoranschluss. Hier überträgt der Motor der Stand der Phasen an dem Fahrtenregler weiter, um genaue Ansteuerung zu ermöglichen. | |||
=== Hall-Sensor === | |||
Der Sensoranschluss des Motors wird in Form eines 6-poligen ZH-Buchse mit Rastermaß 1,5mm bereitgestellt. Die Signale sind wie folgend belegt: | |||
<gallery> | |||
Datei:Motor Hallsensor Anschluss.png|Hall-Sensor-Anschluss | |||
</gallery> | |||
{| class="wikitable" | |||
! Pin !! colspan="2" | Farbe !! Funktion | |||
|- | |||
| 1 | |||
! style="background-color: black;" | | |||
| Schwarz | |||
| GND | |||
|- | |||
| 2 | |||
! style="background-color: orange;" | | |||
| Orange | |||
| Phase A | |||
|- | |||
| 3 | |||
! style="background-color: white;" | | |||
| Weiß | |||
| Phase B | |||
|- | |||
| 4 | |||
! style="background-color: green;" | | |||
| Grün | |||
| Phase C | |||
|- | |||
| 5 | |||
! style="background-color: blue;" | | |||
| Blau | |||
| NC | |||
|- | |||
| 6 | |||
! style="background-color: red;" | | |||
| Rot | |||
| NC | |||
|} | |||
Bei etwa der maximalen Geschwindigkeit ergeben sich Motorphasen der Periodendauer von ca. 10,2ms. Die Mindestzeit zwischen zwei Flanker der Hall-Phasen beträgt dabei ca. 1,5ms. Weitere Informationen zu Geschwindigkeitsermittlung durch die Hall-Signale sind verfügbar unter: [[Signalverarbeitung]] und [[Geschwindigkeitsermittlung]] | |||
<gallery> | |||
Datei:Hallsensor Vorwärts vollgas.png|Hall-Signale des Motors bei maximaler Geschwindigkeit | |||
</gallery> | |||
= Software-Komponenten = | |||
[[Kategorie:AMR]] | |||
Aktuelle Version vom 17. Juli 2015, 10:20 Uhr
Dieser Artikel beschäftigt sich mit den Komponenten eines AMR (autonomer mobiler Roboter) auf Basis eines 1:10 Modellfahrzeugs.
Architekturübersicht
Hardware-Komponenten
Fernbedienungsempfänger
Diese Beschreibung beschränkt sich zunächst auf dem Fernbedienungsempfänger Futaba F143F 50MHz FM. Nichtsdestotrotz können die hier enthaltene Informationen auf andere Empfänger für die gleiche Anwendung übertragen werden.
Der Fernbedienungsempfänger empfängt die Radiosignale der Fernbedienung und gibt Steuersignale zum Lenkservo und Fahrtenregler ab.
Anschlüsse
Die Stromversorgung des Empfängers erfolgt über den Fahrtenregler, der wiederum die Versorgung von Fahrakku entnimmt. Gemessen ist ein Versorgungspegel von 6V.
Die Versorgung des Empfängers kann auch über den BAT- oder B/C-Anschluss erfolgen. Zu beachten ist, dass die Masse- und Versorgungsanschlüsse jeweils über alle Steckplätze kurzgeschlossen sind. An den Anschlüssen CH1 - CH3 können 3 Ausgänge angeschlossen werden. Hier werden der Fahrtenregler an CH1 und der Lenkservo an CH3 angeschlossen.
-
 Skizze des Fernbedienungs-empfängers Futaba F143F
Skizze des Fernbedienungs-empfängers Futaba F143F

Lenk-Signal
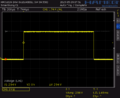
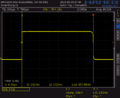
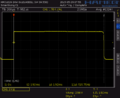
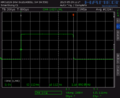
Das Lenksignal wird als PWM-Signal vom Empfänger an dem Lenkservo gegeben. Das Signal ist wie folgend beschaffen:
| Parameter | Wert |
|---|---|
| Amplitude | 3 V |
| Periodendauer | 18,50 ms |
| Frequenz | 54 Hz |
| Pulsweite Lenkung 0-Position | 1,52 ms |
| Tastgrad Lenkung 0-Position | 8,22% |
| Pulsweite Lenkung Rechts | 1,10 ms |
| Tastgrad Lenkung Rechts | 5,94% |
| Pulsweite Lenkung Links | 1,92 ms |
| Tastgrad Lenkung Links | 10,38% |
-
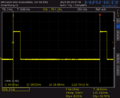 Periodendauer des PWM-Lenksignals
Periodendauer des PWM-Lenksignals -
 Amplitudenmessung des PWM-Lenksignals
Amplitudenmessung des PWM-Lenksignals -
 Pulsweite bei Lenkwinkel = 0
Pulsweite bei Lenkwinkel = 0 -
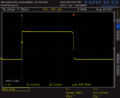 Pulsweite bei Rechtsauschlag
Pulsweite bei Rechtsauschlag -
 Pulsweite bei Linksauschlag
Pulsweite bei Linksauschlag





Gas-Signal
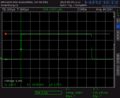
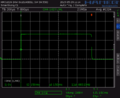
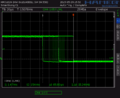
Ähnlich wie das Lenksignal wird das Gassignal in einem PWM-Signal moduliert. Das Signal hat folgende Eigenschaften:
| Parameter | Wert |
|---|---|
| Amplitude | 2,7 V |
| Periodendauer | 18,50 ms |
| Frequenz | 54 Hz |
| Pulsweite bei Pedal 0-Position | 1,50 ms |
| Tastgrad Pedal 0-Position | 8,11 % |
| Pulsweite Vollgas Vorwärts | 1,93 ms |
| Tastgrad Vollgas Vorwärts | 10,43 % |
| Pulsweite Vollgas Rückwärts | 1,11 ms |
| Tastgrad Vollgas Rückwärts | 6 % |
-
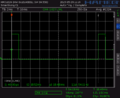 Periodendauer des PWM-Gassignals
Periodendauer des PWM-Gassignals -
 Amplitudenmessung des PWM-Gassignals
Amplitudenmessung des PWM-Gassignals -
 Pulsweite bei Pedalstellung = 0
Pulsweite bei Pedalstellung = 0 -
 Pulsweite bei Vollgas in Vorwärtsrichtung
Pulsweite bei Vollgas in Vorwärtsrichtung -
 Pulsweite bei Vollgas in Rückwärtsrichtung
Pulsweite bei Vollgas in Rückwärtsrichtung





Signalschwankungen
Die oben dargestellten Pulsbreiten der Signale schwanken bei konstanter Betätigung der Fernbedienung um ca. 65µs.
-
 Schwankung der Pulsbreite der Fernbedienungssignale
Schwankung der Pulsbreite der Fernbedienungssignale

Lenkservo
| Pin | Farbe | Funktion | |
|---|---|---|---|
| 1 | Braun | GND | |
| 2 | Rot | Vcc | |
| 3 | Weiß | PWM-Eingang | |
Fahrtenregler
| Pin | Farbe | Funktion | |
|---|---|---|---|
| 1 | Schwarz | GND | |
| 2 | Rot | Vcc | |
| 3 | Weiß | PWM-Eingang | |
Motor
Anschlüsse
Der Motor verfügt über zwei Anschlüsse. Der erste Anschluss dient zur Steuerung der drei Phasen des Motors A, B und C seitens des Fahrtenregler. Da diese Leitungen hohe Ströme führen, ist äußerste Vorsicht bei der Umgang mit denen geboten. Der zweite Anschluss ist der Sensoranschluss. Hier überträgt der Motor der Stand der Phasen an dem Fahrtenregler weiter, um genaue Ansteuerung zu ermöglichen.
Hall-Sensor
Der Sensoranschluss des Motors wird in Form eines 6-poligen ZH-Buchse mit Rastermaß 1,5mm bereitgestellt. Die Signale sind wie folgend belegt:
-
 Hall-Sensor-Anschluss
Hall-Sensor-Anschluss

| Pin | Farbe | Funktion | |
|---|---|---|---|
| 1 | Schwarz | GND | |
| 2 | Orange | Phase A | |
| 3 | Weiß | Phase B | |
| 4 | Grün | Phase C | |
| 5 | Blau | NC | |
| 6 | Rot | NC | |
Bei etwa der maximalen Geschwindigkeit ergeben sich Motorphasen der Periodendauer von ca. 10,2ms. Die Mindestzeit zwischen zwei Flanker der Hall-Phasen beträgt dabei ca. 1,5ms. Weitere Informationen zu Geschwindigkeitsermittlung durch die Hall-Signale sind verfügbar unter: Signalverarbeitung und Geschwindigkeitsermittlung
-
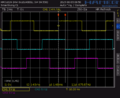 Hall-Signale des Motors bei maximaler Geschwindigkeit
Hall-Signale des Motors bei maximaler Geschwindigkeit
