Datei:NAO Koordinatensystem1.jpg
Es ist keine höhere Auflösung vorhanden.
NAO_Koordinatensystem1.jpg (547 × 568 Pixel, Dateigröße: 33 KB, MIME-Typ: image/jpeg)
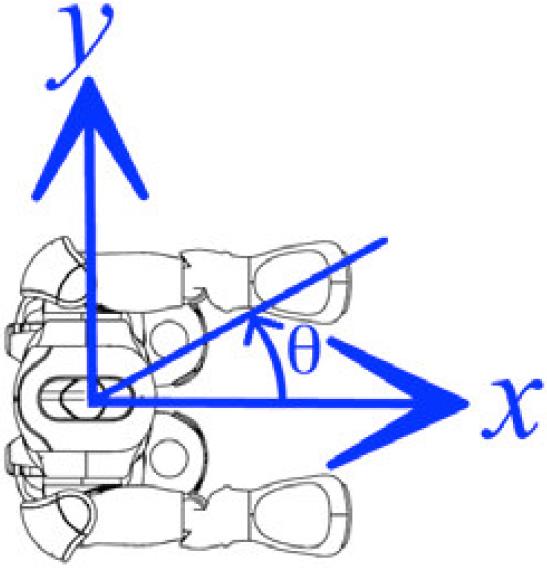
NAO Koordinatensystem
Die Laufrichtung wird mit x angenommen. Die y-Achse zeigt zur linken Seite des Roboters. Theta beschreibt den Winkel des des Roboters bei einer Drehung gegen den Uhrzeigersinn.
Dateiversionen
Klicke auf einen Zeitpunkt, um diese Version zu laden.
| Version vom | Vorschaubild | Maße | Benutzer | Kommentar | |
|---|---|---|---|---|---|
| aktuell | 12:14, 2. Mär. 2016 | | 547 × 568 (33 KB) | Simon Hanemann (Diskussion | Beiträge) | NAO Koordinatensystem Die Laufrichtung wird mit x angenommen. Die y-Achse zeigt zur linken Seite des Roboters. Theta beschreibt den Winkel des des Roboters bei einer Drehung gegen den Uhrzeigersinn. |
Du kannst diese Datei nicht überschreiben.
Dateiverwendung
Die folgende Seite verwendet diese Datei:
{kind=link}