SHARP IR Abstandsensor GP2Y0A21YK0F

→ zurück zum Hauptartikel: Sensortechnik WS 20/21
Autor: Patricio Emiliano Hernandez Murga
Betreuer: Prof. Dr.-Ing. Ulrich Schneider
Aufgabe
In dieser Artikel werden folgenden Punkte behandelt:
- Auswahl eines Primärsensors
- Analyse des Sensors praktisch und anhand von passender Literatur
- Signalverarbeitung
- Bewertung der Sensordaten
- Inbetriebnahme des Analoger Abstandssensors: Sharp IR GP2Y0A21YK0F
Einleitung
Technische Übersicht
Der Sensor besteht aus einem IR Sender (Infrarot LED) und einem positionsempfindilchen Detektor ( engl. PSD - position sensitive detector).
Das Datenblatt für GP2Y0A21YK0F ist es im Internet zu finden
Pinbelegung
| Pin | Belegung |
|---|---|
| 1 |
Ausgang |
| 2 |
Masse |
| 3 | Versorgungsspannung |
Eigenschaften
| Technische Daten | Wert |
|---|---|
| Abmessung |
44,5 mm x 13 mm x 13,5 mm |
| Versorgungsspannung |
4,5 V bis 5,5 V |
| Betriebstemperatur | -10 °C bis 60 °C |
| Messbereich zur Entfernungsmessung (Optimal) | 10 cm bis 80 cm |
Funktionsprinzip
Der Abstandsensor IR GP2Y0A21YK0F ist ein infraroter Triangulationssensor. Er besitzt einen integrierten positionsempfindlichen Detektor ( engl. position sensitive detektor, PSD ), und einem IRED (infrared emmiting diode). Das IRED strahlt ein infrarotes Licht aus, welches von dem zu detektierenden Objekt reflektiert wird. Das reflektierte Licht geht durch das Detektionslens und wird von dem PSD-Element empfangen. Die Abstand zum Objekt wird dann abhängig vom Schwerpunkt des Lichtflecks berechnet. Durch das geometrischen Messverfahren, Triangulation kann die Abstand zu dem zu detektierenden Objekt berechnet werden.
Grundlagen
Funktionsprinzip des positionsempfindlichen Detektors
Ein positionsempfindlicher Detektor funktioniert Ähnlich wie eine normale Photodiode. Das Licht auf dem aktiven Gebiet des PSD generiert einen Photostrom. Dieser Photostrom fließt in Richtung des p- und n-Gebietes ab. Der PSD kann von drei bis fünf Kontakten je nach Dimensionen haben. Beim IR Abstandsensor GP2Y0A21YK0F befindet sich ein eindimensionaler PSD. Daher besitzt er drei Kontaktierungen. Durch die erste Kontaktierung fließt ein gesamter Strom I. Durch die anderen zwei Leitungen kommt zu einer Aufteilung des Photostromes unter der Kontakten. Diese Aufteilung ist proportional zu der Position des Schwerpunkts des Lichtflecks.
Vorteile der PSD
Im Gegensatz zu Pixelelementen (CCD) ist bei positionsempfindlichen Detektoren die Auflösung nicht durch die Pixelgroße begrenzt und es ist keine aufwendige Analyse durch einen Computer nötig. Darüber hinaus sind bei positionsempfindlichen Detektoren Parameter wie Form, Große und Intensivitätsverteilung des Lichtflecks unbedeutend. Denn der Schwerpunkts des Lichtflecks gibt seine Position an.
Ermittlung der Position
Die Position wird durch die Bildung der Stromdifferenz zwischen zwei gegenüberliegenden Kontakten. (Siehe Abbildung 2) Um die Diferenz der Verteilung des gesamten Photostromes unabhängig der Intensität von der einfallenden Lichtintensität zu machen, wird ein Verhältnis daraus gebildet: Durch die folgende Gleichung lässt sich dann die Lage des Schwerpunkts des Lichtes auf der aktiven Fläche des PSD:
Optik
Optische Abstandsensoren strahlen sichtbares bzw. unsichtbares Licht (z.B. infrarotes Licht) aus. Das Licht wird vom Objekt reflektiert und dann vom Sensor erfasst. Aus der vom Sensor erfassten Information kann dann eine Abstand d bestimmt werden. Störungen können bei der auszuwertenden Signal entstehen. Denn es kann passieren, dass der Sensor nicht nur das reflektierte Licht empfängt sondern auch eine externe Licht mit dazu. Um dieses Phänomen zu reduzieren, besitzt der IR Sensor einen besonderen Lens, welches das Infrarotes Licht filtert.
Für den Strahlen verlauf besitzt der IR Abstandsensor GP2Y0A21YK0F eine biaxiale Optik (siehe Abbildung 3). Bei einer biaxialen Optik sind die optischen Achsen des Sende- und Empfangsstrahls voneinander getrennt. In der Regel liegen diese nebeneinander, um die abstandsabhängige Energie zu optimieren. Dabei besitzt die biaxiale Optik einen typsichen Verlauf (siehe Abbildung 4).
-
![Abbildung 2: Schematischer Aufbau und Funktionsweise eines PSD-Elements. [2]](/wiki/images/thumb/e/ee/Darstellung_PSD.png/300px-Darstellung_PSD.png) Abbildung 2: Schematischer Aufbau und Funktionsweise eines PSD-Elements. [2]
Abbildung 2: Schematischer Aufbau und Funktionsweise eines PSD-Elements. [2] -
![Abbildung 3: Prinzipielles Schema beim Triangulations-, Puls-, Phasen- und Frequenzmessverfahren mit biaxialer Optik [2]](/wiki/images/thumb/6/65/Biaxiale_Optik.png/300px-Biaxiale_Optik.png) Abbildung 3: Prinzipielles Schema beim Triangulations-, Puls-, Phasen- und Frequenzmessverfahren mit biaxialer Optik [2]
Abbildung 3: Prinzipielles Schema beim Triangulations-, Puls-, Phasen- und Frequenzmessverfahren mit biaxialer Optik [2] -
![Abbildung 4: Typischer Verlauf einer biaxialer Optik [2]](/wiki/images/thumb/c/c3/Typische_Verlauf_biaxialer_Optik.png/300px-Typische_Verlauf_biaxialer_Optik.png) Abbildung 4: Typischer Verlauf einer biaxialer Optik [2]
Abbildung 4: Typischer Verlauf einer biaxialer Optik [2]
![Abbildung 2: Schematischer Aufbau und Funktionsweise eines PSD-Elements. [2]](/wiki/index.php/Datei:Darstellung_PSD.png)
![Abbildung 3: Prinzipielles Schema beim Triangulations-, Puls-, Phasen- und Frequenzmessverfahren mit biaxialer Optik [2]](/wiki/index.php/Datei:Biaxiale_Optik.png)
![Abbildung 4: Typischer Verlauf einer biaxialer Optik [2]](/wiki/index.php/Datei:Typische_Verlauf_biaxialer_Optik.png)
Messprinzip der Triangulation
Triangulation ist ein rein geometrisches Messverfahren. Das Sender ( infrarotes LED oder IRED) erzeugt Licht und dieses wird auf den zu detektierenden Objekt reflektiert. Das reflektiertes Licht geht durch das für die Detektion verantwortliche Lens mit einer bestimmten Winkel je nach Abstand d. Anhängig von der Eingangswinkel des Lichtes ist dann die Stelle x auf dem PSD-Element. Durch das Messen der stelle x ergibt sich dann den Abstand d.

- – Basisabstand zwischen der optischen Achse der Sende- und der Empfangsoptik.
- – Abstand zwischen Detektionsebene und Optik
- – Schwerpunkt des Lichtflecks
- – Objektabstand
Equipment
Verwendete Software
Verwendete Hardware
Primärsensor
Für den IR-Abstandsensor GP2Y0A21YK0F wird ein PSD benutzt, um die Messgröße, das reflektiertes infrarotes Licht, in ein elektrisches Signal umzuwandeln. Die innere integrierte Schaltung vom Sensor ( distance measuring IC) übernimmt sowohl das Lichterzeugung mittels des IREDs als auch die Umwandlung des vom PSD empfangenen infraroten Lichtes in ein analoges Signal. Das analoge Signal kann einen Wert von 0 V bis 5 V besitzen. Daher wird keinen Verstärker benötigt, um das Signal zu verarbeiten. Es wird alles von der integrierten Schaltung des IR-Abstandssensors unternommen.
Die integrierte Schaltung liefert in Zeitspannen von 28,7 ms bis 47,9 ms einen analogen Wert. Dabei ist zu achten, dass die allererste Messung als instabil gilt und daher die zweite Messung als die erste zu sehen ist. Darüber hinaus ist es auch zu beachten, dass die integrierte Schaltung des IR-Abstandssensor eine Zeitverzögerung von 5 ms (maximal) zwischen Messungen hat.
Analog-Digital-Umsetzer

Um das analoges Signal digital zu verarbeiten, kommt ein Analog-Digital-Umsetzer(ADU, auch bekannt als AD-Wandler) zum Einsatz. Durch den ADU wird die Amplitude des rohen analogen Signals in bestimmten Abständen geteilt. Dabei wird das am Eingang des ADU anliegende analoge Signal in eine ganze Zahl umgerechnet und in binäre Darstellung an den N digitalen Ausleitungen ausgegeben. Die Auflösung des AD-Wandler wird durch die Anzahl N an Bits. (siehe Abbildung 6) . [3] Als erstes findet das sogenannte Sampling statt. Dies bezeichnet das Verfahren zur Entnahme von Verstärkungswerten des analogen Signals in diskreten Zeitintervallen. Danach werden numersiche Werte zu der getesteten Verstärkungswerten zugewiesen. Nach seiner Quantisierung werden die Verstärkungswerte anhand eines Encoders kodiert. Im fall vom Arduino Uno ist ein 10-Bit AD-Wandler vorhanden. Das bedeutet, dass eine Menge von 1024 Werte mit dem an arduino verbauten AD-Wandler diskretisiert werden können. Bei dem Fall von Arduino Uno besitzen die Quantisierungsstufen eine Höhe von ungefähr 4,89 mV.
Bussystem
Es wird kein Bussystem benötigt.
Signalvorverarbeitung
Dadurch dass der IR-Abstandssensor ein analoges Signals liefert muss zu jedem Spannungswert eine Abstand zugewiesen werden. Dies erfolgt anhand einer Kennlinie. Die Kennlinie IR-Abstandsensor GP2Y0A21YK0F kann im Datenblatt [4] gefunden werden(Siehe Abbildung 7). Seine Kennlinie entspricht die allgemeine Kennlinie eines Triangulationssensors mit einer biaxialen Optik. Dabei gibt es kein monoton wachsendes oder fallendes Verhalten über den gesamten Messbereich. Daraus folgt, dass einer Spannung mehrere Abständen zugeordnet werden. Dadurch kann eine Verfälschung von Daten vorkommen.
Um diesen Verhalten zu bekämpfen, kann die umgekehrte Zahl jedes Elementes der Messbereich gebildet werden. Danach werden dieser neue Werte mit den Ausgangswerten des Sensors zugeordnet (siehe Abbildung 8)
-
![Abbildung 7: Kennlinie aus Datenblatt [4]](/wiki/images/thumb/7/7e/Kennlinie_aus_Datenblatt.png/257px-Kennlinie_aus_Datenblatt.png) Abbildung 7: Kennlinie aus Datenblatt [4]
Abbildung 7: Kennlinie aus Datenblatt [4] -
![Abbildung 8: Kennlinie aus Datenblatt (umgekehrte Elemente der Abstände)[4]](/wiki/images/thumb/b/bd/Kennlinie_aus_Datenblatt_umgekehrt.png/260px-Kennlinie_aus_Datenblatt_umgekehrt.png) Abbildung 8: Kennlinie aus Datenblatt (umgekehrte Elemente der Abstände)[4]
Abbildung 8: Kennlinie aus Datenblatt (umgekehrte Elemente der Abstände)[4]
![Abbildung 7: Kennlinie aus Datenblatt [4]](/wiki/index.php/Datei:Kennlinie_aus_Datenblatt.png)
![Abbildung 8: Kennlinie aus Datenblatt (umgekehrte Elemente der Abstände)[4]](/wiki/index.php/Datei:Kennlinie_aus_Datenblatt_umgekehrt.png)
Für die Neukalibrierung der Kennlinie muss beachtet werden, dass der Sensor mit reflektiertem Licht arbeitet. Am besten sollte in der gleichen Umgebung neukalibriert werden, in dem der Sensor im Betrieb gesetzt wird. Das für diese Hausarbeit benutzte Exemplar des IR Abstandsensor GP2Y0A21YK0F wurde mit zwei unterschiedlichen Oberflächenfarben und mit zwei zwei unterschiedlichen Umgebungsbeleuchtungen.
Erste Kalibrierung mit heller Umgebungsbelecuhtung

| Abstand in cm | Analoge 10-Bit-Rohewerte Schwarz | Analoge 10-Bit-Rohewerte Weiss |
|---|---|---|
| 6 |
625 |
625 |
| 10 |
527 |
499 |
| 15 |
364 | 349 |
| 20 |
274 |
270 |
| 25 |
224 |
220 |
| 30 |
189 | 185 |
| 40 |
142 |
142 |
| 50 |
116 |
118 |

| Umgekehrte Abstand in 1/cm | Abstand in cm | Analoge 10-Bit-Rohewerte Schwarz | Analoge 10-Bit-Rohewerte Weiss |
|---|---|---|---|
| 0.02 |
50 | 116 |
118 |
| 0.025 |
40 | 142 |
142 |
| 0.0333 |
30 | 189 | 185 |
| 0.04 |
25 | 224 |
220 |
| 0.05 |
20 | 274 |
270 |
| 0.0667 |
15 | 364 | 349 |
| 0.1 |
10 | 527 |
499 |
| 0.1667 |
6 | 625 |
625 |
Hardwareaufbau
Schaltung des IR-Abstandssensors GP2Y0A21YK0F

Schaltplan und Steckplatine
-
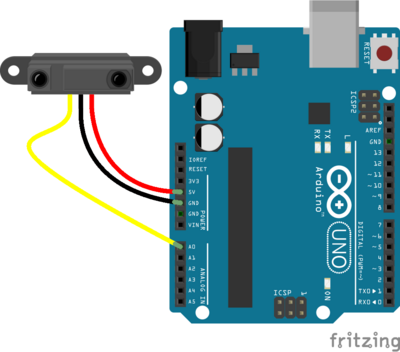 Abbildung 10: Steckplatine
Abbildung 10: Steckplatine -
 Abbildung 11:Schaltplan
Abbildung 11:Schaltplan


Softwarearchitektur

Digitale Signalverarbeitung
Bewertung der Sensordaten
Literatur
[1] Bananarobotics. URL: https://www.bananarobotics.com/shop/Sharp-GP2Y0A21YK0F-IR-Distance-Sensor
[2] Schönfelder, G.; Hering, E.: Sensoren in Wissenschaft und Technik. Wiesbaden: Viewg+Teubner, 2012,S. 166-171 ISBN 978-3-8348-0169-2
[3] Wüst, K.: Mikroprozessortechnik: Grundlagen, Architekturen, Schaltungstechnik und Betrieb von Mikroprozessoren und Mikrocontrollern. Wiesbaden: Viewg+Teubner-Verlag, 11. Auflage 2011, S. 267-368. ISBN:978-3-8348-0906-3
[4] Global Sharp: Datasheet GP2Y0A21YK0F. URL: https://global.sharp/products/device/lineup/data/pdf/datasheet/gp2y0a21yk_e.pdf
→ zurück zum Hauptartikel: Sensortechnik WS 20/21