Gyrosensor (LPR510AL): Unterschied zwischen den Versionen
| Zeile 28: | Zeile 28: | ||
* Tiefpass-Filter, | * Tiefpass-Filter, | ||
* und vierfachen Verstärker pro Ausgang. | * und vierfachen Verstärker pro Ausgang. | ||
=== Nullratenpegel === | |||
Der Nullratenpegel beschreibt das tatsächliche Ausgangssignal, wenn keine Winkelgeschwindigkeit vorhanden ist. Das Nullratenniveau von des Sensors ist durch die Stärke der maximalen Belastung des sensors abhänig. Daher kann sich das Nullratenniveau nach der Montage des Sensors auf einer Leiterplatte oder nachdem dieser einer starken mechanischen Beanspruchung ausgesetzt wurde verändern. Aus diesem Grund ist es wichtig, dass vor einer Messung eine Kalibrierung vorgenommen wird, wie diese implementiert ist, wird im Artikel [[Offsetkalibrierung_des_Gyrosensors| Offsetkalibrierung des Gyrosensors]] Dieser Wert ändert sich sehr | |||
wenig über Temperatur und Zeit. | |||
== '''Inbetriebnahme''' == | == '''Inbetriebnahme''' == | ||
Version vom 16. Juni 2020, 19:19 Uhr

Der Gierratensensor (oder auch Gyrosensor bzw. Drehratensensor) des Autonomen Fahrzeugs stellt unter anderem einen Teil der Einparksensorik dar, die Ermittlung der Rotationsgeschwindigkeit des Fahrzeugs erfolgt über diesen. Verwendet wird der LPR510AL des Herstellers STMicroelectronics, dessen Einsatz wird in diesem Artikel genauer erläutert. Die ermittelten Sensordaten werden in verschiedensten Teilen des gesamten Softwareprojekts verwendet. Der Sensor LPR510AL wurde während des SDE-Praktikums im Sommersemester 2014 das erste Mal eingesetzt und auf seine Funktion überprüft. Die Simulink-Modele sind ältere Versionen, mit denen erste Tests durchgeführt worden sind.
Kurzinfo
Der Gierratensensor LPR510AL ist ein Gyroskop (bzw. Drehratensensor) mit einer Doppelachse zur Messung von der Winkelgeschwindigkeit entlang der Nick- und Rollachse mit einem geringen Leistungsbedarf. Der LPR510AL hat einen maximalen Messbereich von ±100 °/s und ist in der Lage, Raten mit einer Bandbreite von -3 dB bis zu einer Frequenz von 140 Hz zu erkennen. Das Gyroskop besteht aus einer Kombination aus einem Aktuator und einem Beschleunigungsmesser integriert in einem Chip. Es enthält ein Sensorelement, das aus einzelnen Antriebsmasse besteht, die in ständiger schwingender Bewegung gehalten werden und in der Lage ist eine Winkelgeschwindigkeit auf der Grundlage der Coriolis-Kraft zu detektieren. Eine integrierte Auswertungseinheit stellt die gemessene Winkelgeschwindigkeit über eine analoge Ausgangsspannung zur Verfügung. Die Versorgungsspannung beträgt 2,7 V bis 3,6 V. In der Ruhelage befindet sich das Ausgangssignal bei 1,23 V. [1]
Funktionsweise

Wie bereits erläutert enthält der verwendete Gierratensensor ein Sensorelement, das mit Hilfe der Coriolis-Kraft und einer schwingenden Masse die Winkelgeschwindigkeit des gesamten Fahrzeuges erfasst. Somit handelt es sich bei dem eingesetzten Sensor um ein Schwingungsgyrometer. Diese Variante der Gyrometer messen die Coriolis-Beschleunigung mit Hilfe der in folgendem Abschnitt beschriebenen Methode.
Wird der Abstand einer Masse zur Drehachse vergrößert, so muss diese wegen des höheren Radius in der Zeit einer Umdrehung einen größeren Weg zurücklegen. Der Umfang steigt mit dem Radius. Die Masse muss somit eine höhere Tangentialgeschwindigkeit erreichen und zu diesem Zweck beschleunigt werden. Diese Beschleunigung (Coriolis-Beschleunigung) wird gemessen, indem die Masse federnd aufgehängt ist, die Biegung der Aufhängung wird gemessen.
Wird nun der Abstand der mit höherer Tangentialgeschwindigkeit umlaufenden Masse zur Drehachse verringert, muss die Masse langsamer werden, da diese pro Umdrehung einen kleineren Weg zurücklegen muss. Die erforderliche Bremsbeschleunigung wird ebenfalls über die Biegung der Aufhängung gemessen. Bei den Schwingungsgyrometern wird der Abstand einer oder mehrerer Massen zur Drehachse durch eine Schwingungsanregung periodisch vergrößert und wieder verkleinert (Abbildung rechts, Bewegung in y-Richtung). Dadurch muss die Masse im gleichen Takt beschleunigt und wieder abgebremst werden (Bewegung in x-Richtung). Die dafür erforderlichen Kräfte hängen von der Amplitude der Schwingungsanregung und der aktuellen Drehrate ab. Hält man die Schwingungsanregung konstant, kann aus den Beschleunigungskräften die Drehrate ermittelt werden. [2]
Interner Aufbau des ST LPR510AL

Der interne Aufbau ist Abbildung „Blockschaltbild des Gierratensensors“ zu entnehmen. Es handelt sich um einen IC (Integrated Circuit), der insgesamt zwei Ausgänge hat. Der Aufbau des ICs untergliedert sich wiederum in
- eine federnd gelagerte Masse,
- eine Schaltung für die Auswertung der Bewegung in x-Richtung,
- eine Schaltung für die Auswertung der Bewegung in y-Richtung,
- mit jeweiligem Ladungsverstärker,
- Tiefpass-Filter,
- und vierfachen Verstärker pro Ausgang.
Nullratenpegel
Der Nullratenpegel beschreibt das tatsächliche Ausgangssignal, wenn keine Winkelgeschwindigkeit vorhanden ist. Das Nullratenniveau von des Sensors ist durch die Stärke der maximalen Belastung des sensors abhänig. Daher kann sich das Nullratenniveau nach der Montage des Sensors auf einer Leiterplatte oder nachdem dieser einer starken mechanischen Beanspruchung ausgesetzt wurde verändern. Aus diesem Grund ist es wichtig, dass vor einer Messung eine Kalibrierung vorgenommen wird, wie diese implementiert ist, wird im Artikel Offsetkalibrierung des Gyrosensors Dieser Wert ändert sich sehr wenig über Temperatur und Zeit.
Inbetriebnahme
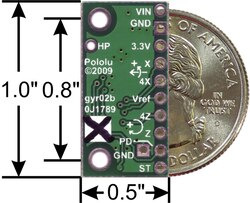
Pinbelegung

| Pinnummer | Pinname | Funktion |
|---|---|---|
| 1 | VIN | Spannungseingang der Platine |
| 2 | GND | Masse - 0V |
| 3 | VDD 3,3V | Eingangsspannung des Sensors |
| 4 | Y | Verdrehung um die Y-Achse ohne Verstärkung |
| 5 | 4Y | Verdrehung um die Y-Achse mit 4x Verstärkung |
| 6 | Vref | Referenzspannung |
| 7 | 4X | Verdrehung um die X-Achse mit 4x Verstärkung |
| 8 | X | Verdrehung um die X-Achse ohne Verstärkung |
| 9 | PD | Power-down (logic 0: normal mode; logic 1: power-down mode) |
| 10 | GND | Masse - 0V |
| 11 | ST | Self-test (logic 0: normal mode; logic 1: self-test) |
Autor: Martin Berysztak (Diskussion) & Adem Hadziric (Diskussion) 21:36, 5. Feb. 2015 (CET)
Funktionsverdrahtung


Beim der Inbetriebnahme des Sensors ist wie bereits beschrieben zu beachten, dass die Eingangsspannung nicht 16V überschreitet, die Plus-Leitung der Spannungsquelle muss an den Pin: VIN (Pin 1) angelegt werden. An den Pin: GND (Pin 2) wird die GND-Leitung der Spannungsquelle angelegt werden. Weiter muss eine Verbindung zwischen dem Pin: 3,3V (Pin 3) und dem Pin: Vref (Pin 6) angebracht werden.
Zum Ablesen der Daten des Sensors, kann die Verbindung der Connector Box (dSPACE) zum Gyrosensor, wird über denn Channel 4 des Analog-Digital-Converters (ADCH4) verbunden werden, dieser wurde bei den Tests augesucht und im Simulink-Model ebenfalls ausgewählt. Die Plus-Leitung der Connector Box Verbindung wird an den Pin gelegt, an dem das Signal abgegriffen werden soll. Pin 4 und Pin 5 für die Y-Richtungsbewegung und Pin 7 und 8 wird X-Richtungsbewegung. Die GND-Leitung der Connector Box Verbindung wird an GND (Pin 2) geschlossen.
Autor: Martin Berysztak (Diskussion) & Adem Hadziric (Diskussion) 21:36, 5. Feb. 2015 (CET)
Verarbeitung in Simulink / ControlDesk
Um die Daten in Simulink zu Verarbeiten ist der Block (MUX ADC9 der dSpace-Libery notwendig. Zum Konvertieren des analogen Ausgangssignals in ein digitales Signal notwendig, welches die Connector Box verarbeiten kann. Die konvertierten Daten (Spannungswerte) werden mithilfe eines Out-Blocks ausgeben. Diese Spannungswerte müssen integriert werden (siehe Simulink-Model: "Ausgabe_in_Grad"), um daraus die Gradänderung zu erhalten. Für den Parameter: "Constant" muss der berechnete Offsetwert (Mittelwert) eingefügt werden.

Die Signale, welche in die Out-Blocks gehen, können via ControlDesk mithilfe des Ploters dargestellt werden.
Autor: Martin Berysztak (Diskussion) & Adem Hadziric (Diskussion) 21:36, 5. Feb. 2015 (CET)
Auswertung der Daten
Erreichbare Auflösung im Zusammenspiel mit der DS1104:
- Der Gierratensensor gibt ein analoges Ausgangssignal aus. Dementsprechend ist die Auflösung nicht bestimmbar und kann als unendlich klein angenommen werden.
- Die Auflösung des Analog-Digital-Converter gibt die Auflösung vor.
Drift:
- Errechnet kann der Drift durch eine Messung über einen längeren Zeitraum werden. Diese müssten entsprechend analysiert werden.
- Der Drift beträgt 0,0004°/sec.
Empfindlichkeit:
- Die Empfindlichkeit lässt sich über die Formel: Empfindlichkeit = Eingang / Ausgang berechnen.
- Die Sensor Empfindlichkeit beträgt: 2,5mV/(°/sek).
- Errechnet wurde der Wert, durch konstantes Schwenken des Sensors um 90°. Über die Zeit gemessen, ist die Empfindlichkeit zu berechnen.
- Aus dem Datenblatt ist dieser Wert ebenfalls zu entnehmen.
Unsicherheit:
- Zur Bestimmung der Unsicherheit wird der Offsetwert des Ruhesignals (keine Bewegung) benötigt. Über das Simulink-Model: "Ausgabe_Mittelwert_Berechnung" wird der Offsetwert berechnet.
- Für den Messmodus Y ist beispielhaft, folgender Offset bestimmt worden:
- y = 1,25336
- Dieser Wert muss im Simulink-Model: "Ausgabe_in_Grad", unter dem Parameter: "Constant" eingetragen werden.
- Mithilfe des Offsets lässt sich die Standardabweichung (Varianz) bestimmen. Die dazugehörige Formel lautet:
- Varianz:
- Standardabweichung:
- Die berechnete Varianz beträgt:
- y = 0,001228V
- Berechnet können diese Werte durch das folgende Simulink-Model werden:

Autor: Martin Berysztak (Diskussion) & Adem Hadziric (Diskussion) 21:36, 5. Feb. 2015 (CET)
Quellen / Weiterführende Informationen
- ↑ "LPR510AL - MEMS motion sensor: dual axis pitch and roll ±100°/s analog gyroscope", Datenblatt von STMicroelectronics. [1]
- ↑ vgl. Reif, Konrad: Sensoren im Kraftfahrzeug. Wiesbaden: Springer Vieweg, 2016. ISBN: 9783658112110. S. 66f.
- ↑ "Anschlusspins des LPR510AL." von Pololu Robotics & Electronics.http://b.pololu-files.com/picture/0J1875.250.jpg?4afe3fed01b3bc58fa14bda28c295f7d
- ↑ "LPR550AL Dual-Axis (Pitch and Roll or XY)",Pololu Robotics & Electronics.[2]
- ↑ "Schaltskizze für den Sensor" von Hadziric & Berysztak. [3]
- ↑ "Vollständige Zip-Datei des Simulinkmodels" von Hadziric & Berysztak. [4]
- ↑ "Vollständige Zip-Datei des Simulinkmodels" von Hadziric & Berysztak. [5]
{kind=link}
![[3]](http://193.175.248.171/wiki/index.php/Datei:Schaltskizze.jpg){kind=link}
Autor: Martin Berysztak (Diskussion) & Adem Hadziric (Diskussion) 21:36, 5. Feb. 2015 (CET)
→ zurück zum Hauptartikel: Praktikum-SDE