Datei:RoboSoccer Gruppe A1.png: Unterschied zwischen den Versionen
KKeine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 4: | Zeile 4: | ||
== Einleitung == | == Einleitung == | ||
Im Laufe des Semester haben wir versucht und geübt den Roboter Schritt für Schritt zu Programmieren , dass er im Spielfeld Soccer spielen kann . | |||
Im Informatik-Praktikum war es unsere Aufgabe einen funktionierenden Roboter mithilfe von [https://www.lego.com/de-de/mindstorms LEGO Mindstorms] zu konstruiren und mit Bricxcc zu programmieren. | Im Informatik-Praktikum war es unsere Aufgabe einen funktionierenden Roboter mithilfe von [https://www.lego.com/de-de/mindstorms LEGO Mindstorms] zu konstruiren und mit Bricxcc zu programmieren. | ||
Dieser Roboter soll dann an einem Robo-Soccer Tunier [http://193.175.248.52/wiki/index.php/Regelwerk_RoboSoccer_2019 (Spielregeln)] an der Hochschule Hamm-Lippstadt in Lippstadt teilnehmen. | Dieser Roboter soll dann an einem Robo-Soccer Tunier [http://193.175.248.52/wiki/index.php/Regelwerk_RoboSoccer_2019 (Spielregeln)] an der Hochschule Hamm-Lippstadt in Lippstadt teilnehmen. | ||
| Zeile 17: | Zeile 18: | ||
=== Unterkonstruktion === | === Unterkonstruktion === | ||
::Der Roboter besteht aus | ::Der Roboter besteht aus 3 Motoren . Die Motoren können die Rotationen auf einen Grad genau bestimmen. Dabei ist die maximale Umdrehungen 160 Umdrehungen/ Minuten und das maximale Drehmoment ca. 0,2 Nm. der Dritte Mototr wird für das schießen des Balls benutzt . | ||
=== NXT-Brick === | === NXT-Brick === | ||
::Der NXT- Brick ist das "Gehirn" von Dem Roboter . Bei ihm werden alle Sensoren und Motoren angeschlossen. | ::Der NXT- Brick ist das "Gehirn" von Dem Roboter . Bei ihm werden alle Sensoren und Motoren angeschlossen. | ||
LEGO Mindstorms NXT System behandelt die Hardwarespezifikation und Hardwareevaluation verschiedene Sensoren für das LEGO Mindstorms-System. Um Kenntnisse über die Genauigkeit und Zuverlässigkeit der Sensoren und Motoren und deren Zusammenspiel mit dem NXT-Baustein zu erhalten wurden zunächst die Hardware des NXT und verschiedener Sensoren spezifiziert. | |||
| Zeile 42: | Zeile 43: | ||
::Der Sensor führt 100 Messungen pro Sekunde durch und übermittelt eine Zahl zwischen 0 und 359, die den Winkel zum Nordpol ausdrückt. Der Sensor verfügt über zwei Modi: | ::Der Sensor führt 100 Messungen pro Sekunde durch und übermittelt eine Zahl zwischen 0 und 359, die den Winkel zum Nordpol ausdrückt. Der Sensor verfügt über zwei Modi: | ||
#Im Lesemodus übermittelt der Sensor jedes Mal einen Wert, wenn er vom intelligenten Lego Mindstorms NXT-Stein einen Lesebefehl erhält. | #Im Lesemodus übermittelt der Sensor jedes Mal einen Wert, wenn er vom intelligenten Lego Mindstorms NXT-Stein einen Lesebefehl erhält. | ||
#Im Kalibriermodus kann der Sensor so eingestellt werden, dass er störende Magnetfelderdes Roboter-Elektromotors, der Batterien usw. neutralisiert. | #Im Kalibriermodus kann der Sensor so eingestellt werden, dass er die störende Magnetfelderdes Roboter-Elektromotors, der Batterien usw. neutralisiert. | ||
::Die Werte können als relative oder absolute Werte angezeigt werden. | ::Es wird einfacher sein , wenn der Roboter auf eine bestimmte Richting , die er folgen soll , eingerichtet wird .Die Werte können als relative oder absolute Werte angezeigt werden. | ||
| Zeile 51: | Zeile 51: | ||
== Hauptprogramm == | == Hauptprogramm == | ||
Das | Das Hauptprinziep des Hauptprogramms ist eine Endlosschleife, die aus "Ballsuche", "Packen", "Ausrichtung" und "Schuss" besteht. Davor wird die Richtung des Tores mit Hilfe des Infrarotsensors durch die Infrarot stärke gelesen . | ||
[[Datei:Plan 1.jpg |300px|thumb|Links|Laufplan]] [[Datei:Code.png |300px|thumb|Links|Code]] | [[Datei:Plan 1.jpg |300px|thumb|Links|Laufplan]] [[Datei:Code.png |300px|thumb|Links|Code]] | ||
| Zeile 128: | Zeile 128: | ||
::''On'' = An; ''Fwd'' = Vorwärts; ''Rev'' = Rückwärts; ''Rotate'' = rotieren; ''Reg'' = Regulation; ''Off'' = Aus; ''Flout'' = gleiten | ::''On'' = An; ''Fwd'' = Vorwärts; ''Rev'' = Rückwärts; ''Rotate'' = rotieren; ''Reg'' = Regulation; ''Off'' = Aus; ''Flout'' = gleiten | ||
== Link zum Video == | == Link zum Video == | ||
Um unseren | Um unseren Roboter in Action zu sehen und um uns kurz vorzustellen klicke auf den [https://www.youtube.com/watch?v=SWC_s83e2KE&feature=youtu.be / Link] | ||
Version vom 4. Februar 2019, 08:46 Uhr
Autoren: Mohamed Soliman und Richard Stanislawiski und Noah Greis
Einleitung
Im Laufe des Semester haben wir versucht und geübt den Roboter Schritt für Schritt zu Programmieren , dass er im Spielfeld Soccer spielen kann . Im Informatik-Praktikum war es unsere Aufgabe einen funktionierenden Roboter mithilfe von LEGO Mindstorms zu konstruiren und mit Bricxcc zu programmieren. Dieser Roboter soll dann an einem Robo-Soccer Tunier (Spielregeln) an der Hochschule Hamm-Lippstadt in Lippstadt teilnehmen.
Bauteile

Unterkonstruktion
- Der Roboter besteht aus 3 Motoren . Die Motoren können die Rotationen auf einen Grad genau bestimmen. Dabei ist die maximale Umdrehungen 160 Umdrehungen/ Minuten und das maximale Drehmoment ca. 0,2 Nm. der Dritte Mototr wird für das schießen des Balls benutzt .
NXT-Brick
- Der NXT- Brick ist das "Gehirn" von Dem Roboter . Bei ihm werden alle Sensoren und Motoren angeschlossen.
LEGO Mindstorms NXT System behandelt die Hardwarespezifikation und Hardwareevaluation verschiedene Sensoren für das LEGO Mindstorms-System. Um Kenntnisse über die Genauigkeit und Zuverlässigkeit der Sensoren und Motoren und deren Zusammenspiel mit dem NXT-Baustein zu erhalten wurden zunächst die Hardware des NXT und verschiedener Sensoren spezifiziert.
Infarot Sensor:
Sensor

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
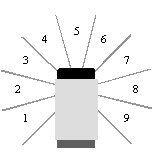
- Der Infrarotsensor (IRSEEKERV2 )besitzt 5 Detektoren, die in einem Radius von 240 Grad, Infrarotsignale erfassen können. Diese 5 Detektoren lassen sich in 9 Sektoren unterteilen um eine genaue Richtung des Infrarotsignales zu bestimmen. Basierend auf dem pyroelektrischen Prinzip, lässt sich sogar die Intensität der Infrarotstrahlen in den Detektoren bestimmen. Dadurch kann ein Abstand des Infrarotball`s ermittelt werden.
Kompass:
- Der Sensor führt 100 Messungen pro Sekunde durch und übermittelt eine Zahl zwischen 0 und 359, die den Winkel zum Nordpol ausdrückt. Der Sensor verfügt über zwei Modi:
- Im Lesemodus übermittelt der Sensor jedes Mal einen Wert, wenn er vom intelligenten Lego Mindstorms NXT-Stein einen Lesebefehl erhält.
- Im Kalibriermodus kann der Sensor so eingestellt werden, dass er die störende Magnetfelderdes Roboter-Elektromotors, der Batterien usw. neutralisiert.
- Es wird einfacher sein , wenn der Roboter auf eine bestimmte Richting , die er folgen soll , eingerichtet wird .Die Werte können als relative oder absolute Werte angezeigt werden.
Hauptprogramm
Das Hauptprinziep des Hauptprogramms ist eine Endlosschleife, die aus "Ballsuche", "Packen", "Ausrichtung" und "Schuss" besteht. Davor wird die Richtung des Tores mit Hilfe des Infrarotsensors durch die Infrarot stärke gelesen .


Ansteuerung der Aktoren
Als Aktuatoren haben wir nur die Motoren von NXT. Die nachfolgenden Befehle, beziehen sich auf die Möglichkeiten der Ansteuerung der Motoren
- OnFwd() oder OnRev()
- RotateMotor()
- OnFwdReg() oder OnRevReg()
- OnFwdSync() oder OnRevSync()
- Off() oder Float()
- Motor fährt geradeaus mit einer angegeben Geschwindigkeit
- OnFwd(Ausgang_Motor, Leistung);
- Motor fährt rückwärts mit einer angegeben Geschwindigkeit
- OnRev(Ausgang_Motor, Leistung);
- Motor rotiert mit einer angegeben Geschwindigkeit bis zu dem angegebenen Winkel
- RotateMotor(Ausgang_Motor, Leistung, Winkel);
- Regulierungsmodus, zum synchronen Motorenlauf in Fahrtrichtung Vorwärts
- OnFwdReg(Ausgang_Motor, Leistung, REGMODE);
- Regulierungsmodus, zum synchronen Motorenlauf in Fahrtrichtung Rückwärts
- OnRevReg(Ausgang_Motor, Leistung, REGMODE);
- Automatisches fahren einer Kurve durch Angaben eines Radius in Fahrtrichtung Vorwärts
- OnFwdSync(Ausgang_Motor, Leistung, Radius);
- Automatisches fahren einer Kurve durch Angaben eines Radius in Fahrtrichtung Rückwärts
- OnRevSync(Ausgang_Motor, Leistung, Radius);
- Motor bremst sofort ab
- Off(Ausgang_Motor);
- Motor läuft aus
- Float (Ausgang_Motor);
- Begriffe:
- On = An; Fwd = Vorwärts; Rev = Rückwärts; Rotate = rotieren; Reg = Regulation; Off = Aus; Flout = gleiten
Link zum Video
Um unseren Roboter in Action zu sehen und um uns kurz vorzustellen klicke auf den / Link
Dateiversionen
Klicke auf einen Zeitpunkt, um diese Version zu laden.
| Version vom | Vorschaubild | Maße | Benutzer | Kommentar | |
|---|---|---|---|---|---|
| aktuell | 16:37, 3. Feb. 2019 |  | 900 × 1.600 (484 KB) | Mohamed Soliman (Diskussion | Beiträge) |
Du kannst diese Datei nicht überschreiben.
Dateiverwendung
Keine Seiten verwenden diese Datei.
{kind=link}