ASF Gruppe A4 - SoSe18: Unterschied zwischen den Versionen
| (18 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 2: | Zeile 2: | ||
'''Autoren und Gruppenmitglieder:''' [[Benutzer:Rina_Mucaj|Rina Muçaj]], [[Benutzer:Jan_Pinter|Jan Pinter]] und [[Benutzer:Levin_Baumeister|Levin Baumeister]] | '''Autoren und Gruppenmitglieder:''' [[Benutzer:Rina_Mucaj|Rina Muçaj]], [[Benutzer:Jan_Pinter|Jan Pinter]] und [[Benutzer:Levin_Baumeister|Levin Baumeister]] | ||
[[Datei:SS18 A4 FotoName.png|600px|right|thumb|Name des Roboters]] | |||
== Einleitung == | == Einleitung == | ||
| Zeile 52: | Zeile 53: | ||
* Leichte Anschließbarkeit | * Leichte Anschließbarkeit | ||
<br/> | <br/> | ||
| Zeile 74: | Zeile 74: | ||
<gallery widths="250" heights="150" perrow="3" class="float-right"> | <gallery widths="250" heights="150" perrow="3" class="float-right"> | ||
Datei: | Datei:SS18 A4 Foto1.jpg|Seitenansicht des Roboters | ||
Datei: | Datei:SS18 A4 Foto2.jpg|Detailansicht mit Kamera | ||
Datei: | Datei:SS18 A4 Foto3.jpg|Vorderansicht | ||
Datei: | Datei:SS18 A4 Foto4.jpg|Draufsicht im Detail | ||
Datei: | Datei:SS18 A4 Foto5.jpg|Seitenansicht | ||
</gallery> | </gallery> | ||
== Fahrstrategie == | == Fahrstrategie == | ||
| Zeile 105: | Zeile 99: | ||
=== Umsetzung in NXC und MATLAB=== | === Umsetzung in NXC und MATLAB=== | ||
Die Implementierung der ersten Praktikumsaufgaben wurde in MATLAB umgesetzt, später wurde, wie auch schon im Informatikpraktikum I - WS17/18, NXC verwendet. | Die Implementierung der ersten Praktikumsaufgaben wurde in MATLAB umgesetzt, später wurde, wie auch schon im Informatikpraktikum I - WS17/18, NXC verwendet, da mit dieser Programmiersprache eine einfache Einbindung der Kamera möglich ist und keine konstante Verbindung zu einem PC mit MATLAB benötigt wird. | ||
Die grundsätzliche MATLAB-Befehle wurden den MATLAB-Tutorials [https://matlabacademy.mathworks.com/?s_cid=learn_MLacad_ban MATLAB Courses<ref> MATLAB Courses - https://matlabacademy.mathworks.com/?s_cid=learn_MLacad_ban </ref>] entnommen. | Die grundsätzliche MATLAB-Befehle wurden den MATLAB-Tutorials [https://matlabacademy.mathworks.com/?s_cid=learn_MLacad_ban MATLAB Courses<ref> MATLAB Courses - https://matlabacademy.mathworks.com/?s_cid=learn_MLacad_ban </ref>] entnommen. | ||
| Zeile 205: | Zeile 199: | ||
<gallery widths="350" heights="200"> | <gallery widths="350" heights="200"> | ||
SS18 A4 VFoto.jpg | verweis=https://youtu.be/6-3ndXZcRbw | |||
</gallery> | </gallery> | ||
Video zum Roboter | Video zum Roboter der Gruppe A4 | ||
<br /> | <br /> | ||
| Zeile 228: | Zeile 222: | ||
== Erfolg == | == Erfolg == | ||
Der Roboter hat erfolgreich am Praktikum teilgenommen, er hat die | Der Roboter hat erfolgreich am Praktikum teilgenommen, er hat die zweitgrößte Distanz zurückgelegt. | ||
== Literaturverzeichnis == | == Literaturverzeichnis == | ||
Aktuelle Version vom 27. Juli 2018, 20:24 Uhr
Autoren und Gruppenmitglieder: Rina Muçaj, Jan Pinter und Levin Baumeister

Einleitung
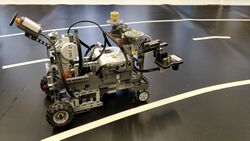
Die Aufgabe bestand darin ein Lego Mindstorms NXT Fahrzeug zu konstruieren und zu programmieren, sodass dieses nach dem gegebenen Regelwerk in der Lage ist autonom einer Fahrspur auf dem Boden zu folgen. Dies geschieht im Rahmen des Informatikpraktikum II, SS 18 mit Professor Ulrich Schneider. Weitere Informationen unter Autonomes Fahren SoSe18.
Gruppenmitglieder und ihre Aufgaben
Rina Muçaj
- Konstruktion des Roboters
- Bearbeitung der inhaltlichen Fragen der jeweiligen Praktikumstermine
- Erstellung des Videos
- Verfassen des HSHL-Wiki-Artikels
Jan Pinter
- Konstruktion des Roboters
- Entwicklung der Fahrstrategie mit PAP-Designer
- Umsetzung der Fahrstrategie in Quellcode
- Erstellung des Videos
Levin Baumeister
- Konstruktion des Roboters
- Entwicklung der Fahrstrategie mit PAP-Designer
- Erstellung des Bauplans
- Verfassen des HSHL-Wiki-Artikels
Verwendete Softwaretools
- MATLAB[1] in Kombination mit der RWTH - Mindstorms NXT Toolbox for MATLAB[2] (für die Programmierung der Fahrstrategie zu Beginn des Praktikums)
- Bricx Command Center[3] mit der Programmiersprache NXC[4] (Not eXactly C, für die Programmierung der Fahrstrategie)
- LEGO Digital Designer 4.3[5] (zur Erstellung des Bauplans des Roboters)
- PapDesigner[6] (zur Erstellung des Programmablaufplans nach DIN 66001)
- muvee Reveal Encore 2018[7] (zur Erstellung des YouTube-Videos)
- Captura Version 6.0.1[8] (zur Erstellung des YouTube-Videos)
- Hilfeseite des Wikimedia-Projekts[9] (Hilfe bei der Erstellung des Wiki-Artikels)
Verwendete Hardware
- LEGO MINDSTORMS NXT Education (Set 9797)[10]
- LEGO Education Resource Set (Set 9695)[11]
- NXTCam-v4, Vision Subsystem - Camera for NXT or EV3[12]
Das Lego Set 9797 bildet zusammen mit dem Lego Set 9695 die Grundlage des Roboters, inklusive der Motoren, der Steuerungseinheit (NXT Brick) und der Basis-Sensoren (Tastsensor). Damit der Roboter jedoch in der Lage ist autonom zu fahren, wird die NXTCam-v4 (Vision Subsystem - Camera for NXT or EV3) verwendet.
Die genaue Zusammensetzung der Hardware ist der Bauanleitung und dem Modell (zu öffnen mit LEGO Digital Designer 4.3, enthalten ist ebenfalls eine Bauanleitung) zu entnehmen: Datei:SS18 A4 Anleitung.pdf, Datei:SS18 A4 Modell.zip.

Bei der Entwicklung der Hardwarezusammensetzung standen folgende Punkte im Vordergrund:
- Leicht zu wartende und solide Bauweise
- Direkt angetriebene Lenkachse
- Kleinere Räder an der Front für bessere Beweglichkeit
- Verstellbare Kamerahalterung
- Leichte Anschließbarkeit
| Parameter | Wert |
|---|---|
| Fahrzeuglänge | 390 mm |
| Fahrzeugbreite | 175 mm |
| Spurweite vorne | 130 mm |
| Spurweite hinten | 160 mm |
| Achsabstand | 200 mm |
| Max. Radeinschlagswinkel links/ rechts | 40° |
-
 Seitenansicht des Roboters
Seitenansicht des Roboters -
 Detailansicht mit Kamera
Detailansicht mit Kamera -
 Vorderansicht
Vorderansicht -
 Draufsicht im Detail
Draufsicht im Detail -
 Seitenansicht
Seitenansicht





Fahrstrategie
Bei der Entwicklung der Fahrstrategie standen folgende Punkte in Vordergrund:
- Geregelte Querlenkung
- Fahrgeschwindigkeit an Lenkung angepasst
- Einhalten der StVO
PAP Diagramme
Motor A: Lenkmotor
Motor B: Antriebsmotor
-
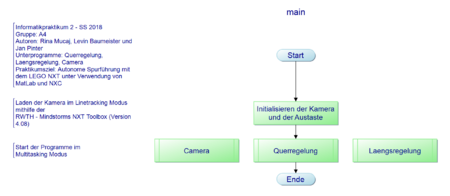 Hauptprogramm
Hauptprogramm -
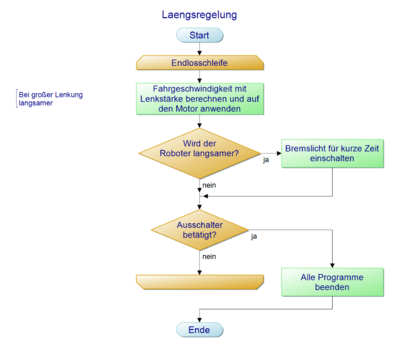 Unterprogramm Längsregelung
Unterprogramm Längsregelung -
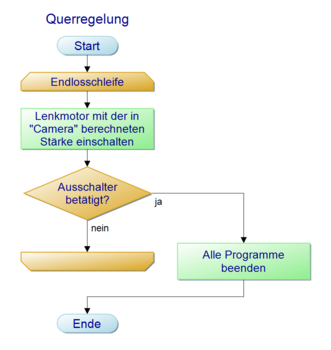 Unterprogramm Querregelung
Unterprogramm Querregelung -
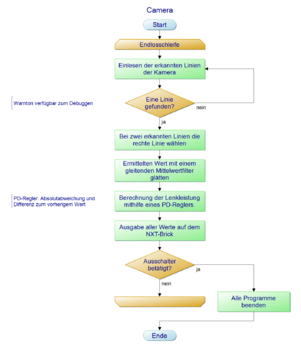 Unterprogramm Camera
Unterprogramm Camera




Umsetzung in NXC und MATLAB
Die Implementierung der ersten Praktikumsaufgaben wurde in MATLAB umgesetzt, später wurde, wie auch schon im Informatikpraktikum I - WS17/18, NXC verwendet, da mit dieser Programmiersprache eine einfache Einbindung der Kamera möglich ist und keine konstante Verbindung zu einem PC mit MATLAB benötigt wird.
Die grundsätzliche MATLAB-Befehle wurden den MATLAB-Tutorials MATLAB Courses[13] entnommen.
NXT spezifische MATLAB-Befehle siehe LEGO MINDSTORMS NXT Support from MATLAB[14], RWTH - Mindstorms NXT Toolbox for MATLAB - Toolbox Documentation[15] und interne Hilfefunktion der Toolbox.
NXC-Befehle siehe Einführung in die Programmierung mit NXC[16], Buch „Roboter programmieren mit NXC für LEGO Mindstorms NXT“[17],
Programmierung LEGO NXT Roboter mit NXC [18] und NXC Programmer's Guide [19]. (In diesen Dokumenten befindet sich auch eine Übersicht der Sensoren und Aktoren).
MATLAB-Quellcode aus Praktikumstermin 1, Aufgabe 1.5:
motor1 = NXTMotor(motor);
motor1.SpeedRegulation = false;
motor1.Power = geschwindigkeit;
motor1.TachoLimit = laenge;
motor1.ActionAtTachoLimit = 'Brake';
motor1.SendToNXT();
disp('Berechnung beendet');
fprintf('\n');
tacho=0;
strecke=0;
tic;
i=0;
% monitor during movement
data = motor1.ReadFromNXT();
while(1)
i=i+1;
data = motor1.ReadFromNXT(); % refresh
Zeit(i)=toc;
tacho=-data.TachoCount;
Strecke(i)=tacho*1
if i>1
dt = Zeit(i)-Zeit(i-1);
ds = Strecke(i)-Strecke(i-1);
Geschwindigkeit(i)=ds/dt;
else
Geschwindigkeit(i)=0;
end
if Strecke(i) > 2000
motor1.Stop('off');
break;
end;
end
%% Plot erstellen
%Fenster wird erstellt
figure(1);
subplot 211
plot(Zeit,Strecke,'r.-');
title('s-t-Diagramm');
xlabel('Zeit in Sekunden');
ylabel('Strecke in cm');
subplot 212
plot(Zeit,Geschwindigkeit,'b.-');
% Grafiküberschrift
title('123');
% x-Achse Beschriftung
xlabel('456');
% y-Achse Beschriftung
ylabel('789');
NXC-Quellcode aus Praktikumstermin 5 , Aufgabe 5.3 :
const byte camPort = IN_1;
#define CAMADDR 0x02
#include "nxtcamlib-default.nxc"
task main ()
{
int cam;
Wait(100);
// Camera initialisieren
cam = NXTCam_Init(camPort, CAMADDR);
Wait(100);
//Line Tracking Modus
NXTCam_SendCommand(camPort, CAMADDR,'L');
Wait(100);
//Tracking einschlaten
NXTCam_SendCommand(camPort, CAMADDR,'E');
Wait(100);
//LCD-Anzeige leeren
ClearScreen();
//Text ausgeben
TextOut(0, LCD_LINE1, "Verbindung aktiv" );
TextOut(40, LCD_LINE2, "..." );
Wait(5000);
}
}
YouTube-Video
Video zum Roboter der Gruppe A4
Video-Beschreibung:
Herausgeber: Rina Muçaj, Levin Baumeister und Jan Pinter
Hochschule: Hochschule Hamm-Lippstadt
Studiengang: Mechatronik 2. Semester
Projektkurs: Informatikpraktikum II (Gruppe A4)
Betreuer: Prof. Dr. Ing.-Schneider
Musik: Epic - Royalty Free Music[20]
Praktikumsziel: Konstruktion und Programmierung eines LEGO-Mindstorms zur autonomen Spurführung in den Programmiersprachen NXC und MATLAB
Zusammenfassung
Lerneffekt
- Programmierung eines mechatronischen Systems
- Vertiefung der Programmierkenntnisse mit der Sprache C und MATLAB
- Zusammenhänge zwischen den Bauteilen (Sensoren, Aktoren) verstehen
- Erfahrungen mit dem Einsatz von verschiedenen digitalen Filtern
- Erfahrung mit Bild- und Videobearbeitungsprogrammen
Erfolg
Der Roboter hat erfolgreich am Praktikum teilgenommen, er hat die zweitgrößte Distanz zurückgelegt.
Literaturverzeichnis
- ↑ MATLAB - https://de.mathworks.com/products/matlab.html
- ↑ RWTH - Mindstorms NXT Toolbox for MATLAB - http://www.mindstorms.rwth-aachen.de/
- ↑ Bricx Command Center - http://bricxcc.sourceforge.net/
- ↑ NXC - https://de.wikipedia.org/wiki/Not_eXactly_C
- ↑ LEGO Digital Designer 4.3 - http://ldd.lego.com/de-de
- ↑ PapDesigner - http://friedrich-folkmann.de/papdesigner/Hauptseite.html/
- ↑ muvee Reveal Encore 2018 - https://www.muvee.com/
- ↑ Captura Version 6.0.1 - http://mathewsachin.github.io//
- ↑ Hilfeseite des Wikimedia-Projekts - http://meta.wikimedia.org/wiki/Help:Editing/de
- ↑ http://robotsquare.com/2012/02/18/understanding-nxt-versions/
- ↑ http://www.nxtprograms.com/help/parts/9797.html
- ↑ http://www.mindsensors.com/ev3-and-nxt/14-vision-subsystem-camera-for-nxt-or-ev3-nxtcam-v4
- ↑ MATLAB Courses - https://matlabacademy.mathworks.com/?s_cid=learn_MLacad_ban
- ↑ LEGO MINDSTORMS NXT Support from MATLAB - https://de.mathworks.com/hardware-support/lego-mindstorms-matlab.html
- ↑ RWTH - Mindstorms NXT Toolbox for MATLAB - Toolbox Documentation - http://www.mindstorms.rwth-aachen.de/trac/wiki/Documentation
- ↑ Einführung in die Programmierung mit NXC - http://www.brgkepler.at/~robotik/home/documents/BRG_Kepler_Tutorial_NXC.pdf
- ↑ Buch "Roboter programmieren mit NXC für LEGO Mindstorms NXT" - https://www.daniel-braun.com/buch/roboter-programmieren-mit-nxc/
- ↑ Programmierung LEGO NXT Roboter mit NXC - https://gym-leibnitz.lima-city.de/robotik/wp-content/uploads/2016/01/NXC_Tutorial_DE.pdf
- ↑ NXC Programmer's Guide - http://bricxcc.sourceforge.net/nbc/nxcdoc/nxcapi/index.html
- ↑ Epic - Royalty Free Music - https://www.bensound.com/royalty-free-music/track/epic
Alle verwendeten Bildmaterialien auf dieser Seite wurden eigenständig erstellt.
→ zurück zum Hauptartikel: Informatikpraktikum 2 SoSe18