AF: Abstandssensorik (SenAbs): Unterschied zwischen den Versionen
| (34 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) | |||
| Zeile 7: | Zeile 7: | ||
== Messkette == | == Messkette == | ||
[[Datei:Messkette IR Sensor.jpg|thumb|right|550px|Abb. 2: Darstellung der | [[Datei:Messkette IR Sensor.jpg|thumb|right|550px|Abb. 2: Darstellung der Messkette ab dem Eingang in die DSpace Karte]] | ||
Die Messkette erfolgt wie in | Die Messkette fängt am Infrarotsensor an. Der gemessene Abstand wird vom Sensor über das gelbe Signalkabel in Volt an die DSpace Karte übermittelt. Danach erfolgt die Messkette wie in Abbildung 02 zu sehen. Das elektrische Signal von IR-Sensor wird vom ADC in ein digitales Signal gewandelt und wird daraufhin mit 10 multipliziert um die Spannung in Volt als digitales Signal darzustellen. Darauf folgt die Umwandlung der Spannung in ein Abstandsmaß in Meter, dies wird durch die Lookup Tabel erreicht. Nun beginnt die Glättung des Messignales, die durch einen Median Filter und einen PT1 Tiefpassfilter realisiert wird. Nach der Glättung und somit der Filterung der Spikes, kann das Messignal am Ausgang (grün Dargestellt) entnommen werden. | ||
== Systementwurf == | == Systementwurf == | ||
| Zeile 70: | Zeile 70: | ||
=== Analoge Signalverarbeitung === | === Analoge Signalverarbeitung === | ||
Um das analoge Signal digital zu verarbeiten, wird ein Analog-Digital-Umsetzer verwendet. Durch den ADU werden Spannungen in bestimmten diskreten Stufen wahrgenommen. Diese Spannungsstufen werden im Fall der DSPACE Karte, in dem ein 12-Bit Wandler verbaut ist, in <math>2^{12}= 4096</math> Spannungsstufen unterteilt. Dabei hat eine Spannungsstufe, durch den maximalen | Um das analoge Signal digital zu verarbeiten, wird ein Analog-Digital-Umsetzer verwendet. Durch den ADU werden Spannungen in bestimmten diskreten Stufen wahrgenommen. Diese Spannungsstufen werden im Fall der DSPACE Karte, in dem ein 12-Bit Wandler verbaut ist, in <math>2^{12}= 4096</math> Spannungsstufen unterteilt. Dabei hat eine Spannungsstufe, die durch den maximalen Eingang am ADC von 10 V, eine Breite/Auflösung von: <math>U_{LSB}=\frac{10\,V}{4096}\approx 2,4414\,mV</math>. | ||
=== Schnittstelle zur DS1104 === | === Schnittstelle zur DS1104 === | ||
| Zeile 84: | Zeile 84: | ||
! style="font-weight: bold;" | Ausgangssignal | ! style="font-weight: bold;" | Ausgangssignal | ||
|- | |- | ||
| 1 ||Ausgang || Gelb || rechts vorne || J21_IR_V || P1A-46_ADCH5 ||<code>SenAbs_xVR_K_f64 </code> | | 1 ||Ausgang || ! style="background-color: yellow;"|Gelb || rechts vorne || J21_IR_V || P1A-46_ADCH5 ||<code>SenAbs_xVR_K_f64 </code> | ||
|- | |- | ||
| 1 ||Ausgang || Gelb || rechts hinten|| J22_IR_H || P1B-46_ADCH6 ||<code>SenAbs_xHR_K_f64</code> | | 1 ||Ausgang || ! style="background-color: yellow;"|Gelb || rechts hinten|| J22_IR_H || P1B-46_ADCH6 ||<code>SenAbs_xHR_K_f64</code> | ||
|- | |- | ||
| 1 ||Ausgang || Gelb || hinten links|| J20_IR_HL || P1B-44 ADCH8 ||<code>SenAbs_yHL_K_f64</code> | | 1 ||Ausgang || ! style="background-color: yellow;"|Gelb || hinten links|| J20_IR_HL || P1B-44 ADCH8 ||<code>SenAbs_yHL_K_f64</code> | ||
|- | |- | ||
| 1 ||Ausgang || Gelb || hinten rechts|| J19_IR_HR || P1A-44_ADCH7 ||<code>SenAbs_yHR_K_f64</code> | | 1 ||Ausgang || ! style="background-color: yellow;"|Gelb || hinten rechts|| J19_IR_HR || P1A-44_ADCH7 ||<code>SenAbs_yHR_K_f64</code> | ||
|- | |- | ||
| 2 || Masse (GND) || Schwarz || || || || | | 2 || Masse (GND) || style="background-color: black;color: white;"|Schwarz || || || || | ||
|- | |- | ||
| 3 || Versorgungsspannung VCC || Rot || || || || | | 3 || Versorgungsspannung VCC || ! style="background-color: red;"|Rot || || || || | ||
|} | |} | ||
== Sensorblock - SenAbs == | == Sensorblock - SenAbs == | ||
<gallery widths="1200" heights="450"> | <gallery widths="1200" heights="450"> | ||
Datei:SenAbs.png|Abb. 4: SenAbs - Abstandssensorik | Datei:SenAbs.png|Abb. 4: SenAbs - Abstandssensorik | ||
Datei:IR Messkette .png|Abb. 5: Inhalt von SenAbs - Abstandssensorik | Datei:IR Messkette .png|Abb. 5: Inhalt von SenAbs - Abstandssensorik | ||
</gallery> | </gallery> | ||
Die Signalverarbeitung erfolgt ausschließlich im Block SEN. <br> | Die Signalverarbeitung erfolgt ausschließlich im Block SEN. <br> | ||
In der Abbildung 04 wird die Lage der SenAbs - Abstandssensorik (unter den blau Makierten Block) abgebildet, dieser hat keine Eingangsparameter. <br> | |||
In der Abbildung | Die darauffolgende Abbildung 05 zeigt die Signalverarbeitung im Block SenAbs - Abstandssensorik. Die Beschreibung findet sich in der nachfolgenden Tabelle: | ||
<br> | |||
Die darauffolgende Abbildung | |||
{| class="wikitable" | {| class="wikitable" | ||
|+ style = "text-align: left"|Tabelle 4: Beschreibung der Simulink Blöcke | |+ style = "text-align: left"|Tabelle 4: Beschreibung der Simulink Blöcke | ||
| Zeile 116: | Zeile 112: | ||
| DS1104ADC_C5 ... C8||Ist der Ausgang gewandelter analoger Signale in digitale Signale. | | DS1104ADC_C5 ... C8||Ist der Ausgang gewandelter analoger Signale in digitale Signale. | ||
|- | |- | ||
| | | Gain ||Multiplikator benötigt, da D1104 Spannungswerte durch 10 teilt. | ||
|- | |||
| Lookup Table ||Lookuptabel zum Umwandeln der analogen Spannungswerte in einen digitalen Wert in Meter. | |||
|- | |- | ||
| | | Median Filter ||Median Filterung zum entfernen der Spikes im Messsignal. | ||
|- | |- | ||
| | | PT1 ||PT1 Filterung um Spikes weiter zu glätten. | ||
|} | |} | ||
{| class="wikitable" | {| class="wikitable" | ||
|+ style = "text-align: left"|Tabelle 5: Signalbezeichnungen vom Eingang bis Ausgang für | |+ style = "text-align: left"|Tabelle 5: Signalbezeichnungen vom Eingang bis Ausgang für Messungen mit ControlDesk | ||
! style="font-weight: bold;" | IR_Sensor | ! style="font-weight: bold;" | IR_Sensor | ||
! style="font-weight: bold;" | | ! style="font-weight: bold;" | ADC zu Gain | ||
! style="font-weight: bold;" | Gain zu Lookup Table | |||
! style="font-weight: bold;" | Lookup Table zu Median Filter | |||
! style="font-weight: bold;" | Median Filter zu PT1 | |||
! style="font-weight: bold;" | PT1 zum Ausgang | |||
|- | |- | ||
| xVR ||<code> | | xVR ||<code>SenAbs_ADC_xVR_f64</code>||<code>SenAbs_Volt_xVR_f64</code>||<code>SenAbs_LookUp_xVR_f64</code>||<code>SenAbs_MedianFilter_xVR_f64</code>||<code>SenAbs_PT1_xVR_f64</code> | ||
|- | |- | ||
| xHR ||<code> | | xHR ||<code>SenAbs_ADC_xHR_f64</code>||<code>SenAbs_Volt_xHR_f64</code>||<code>SenAbs_LookUp_xHR_f64</code>||<code>SenAbs_MedianFilter_xHR_f64</code>||<code>SenAbs_PT1_xHR_f64</code> | ||
|- | |- | ||
| yHR ||<code> | | yHR ||<code>SenAbs_ADC_yHR_f64</code>||<code>SenAbs_Volt_yHR_f64</code>||<code>SenAbs_LookUp_yHR_f64</code>||<code>SenAbs_MedianFilter_yHR_f64</code>||<code>SenAbs_PT1_yHR_f64</code> | ||
|- | |- | ||
| yHL ||<code> | | yHL ||<code>SenAbs_ADC_yHL_f64</code>||<code>SenAbs_Volt_yHL_f64</code>|| <code>SenAbs_LookUp_yHL_f64</code>||<code>SenAbs_MedianFilter_yHL_f64</code>||<code>SenAbs_PT1_yHL_f64</code> | ||
|} | |} | ||
Die Tabelle zeigt die Signale, die man in ControlDesk auswählen muss um alle Daten aus der Messkette mitzuschneiden | Die Tabelle zeigt die Signale, die man in ControlDesk auswählen muss um alle Daten aus der Messkette mitzuschneiden. | ||
== Signalanalyse == | == Signalanalyse == | ||
| Zeile 143: | Zeile 145: | ||
===Vorgehensweise bei der Messung=== | ===Vorgehensweise bei der Messung=== | ||
<gallery widths="1200" heights="450"> | <gallery widths="1200" heights="450"> | ||
Datei:WhatsApp Image 2023-04-25 at 10.41.24.jpg|Abb. 6: Messaufbau für den Funktionstest und die Darstellung der Messkette | Datei:WhatsApp Image 2023-04-25 at 10.41.24.jpg|Abb. 6: Messaufbau für den Funktionstest und die Darstellung der Messkette | ||
</gallery> | </gallery> | ||
Hilfsmittel: | Hilfsmittel: | ||
| Zeile 164: | Zeile 166: | ||
| Funktionstest der '''y-IR-Sensoren'''|| 15 cm|| 2023_04_18_IR_Test003.mat || <code>SenAbs_yHL_K_f64</code> <code>SenAbs_yHR_K_f64</code> | | Funktionstest der '''y-IR-Sensoren'''|| 15 cm|| 2023_04_18_IR_Test003.mat || <code>SenAbs_yHL_K_f64</code> <code>SenAbs_yHR_K_f64</code> | ||
|- | |- | ||
| Messkette des Sensors ''' | | Messkette des Sensors '''xVR'''|| 4, 10, 20, 25, 30 cm|| 2023_04_18_IR_Test006.mat || Signalnamen für xVR aus der Tabelle 5 | ||
|- | |- | ||
|} | |} | ||
| Zeile 170: | Zeile 172: | ||
===Funktionstest aller 4 Sensoren auf Referenzentfernung 15 cm=== | ===Funktionstest aller 4 Sensoren auf Referenzentfernung 15 cm=== | ||
<gallery widths="1200" heights="450"> | <gallery widths="1200" heights="450"> | ||
Datei:Funktionstest .png|Abb. 7: Funktionstest aller vier Sensoren | Datei:Funktionstest .png|Abb. 7: Funktionstest aller vier Sensoren | ||
</gallery> | </gallery> | ||
Der Funktionstest der vier Sensoren | Der Funktionstest der vier Sensoren wurde bei einen Abstand von 15 cm durchgeführt, in der Abbildung 07 sind die vier Sensoren dargestellt. Die Plots zeigen eine schwarze Referenzlinie bei 15 cm und die gemessenen Werte in blau. Die gemessen Werte wurden am Ausgang der Messkette abgegriffen und über Controldesk gespeichert. Die Messwerte zeigen, dass nach der Überarbeitung der Messkette sämtliche Werte mit der Referenzmessung übereinstimmen. | ||
===Kennlinientest eines Sensors auf die Referenzentfernungen 4 cm ... max. 30 cm Reichweite=== | ===Kennlinientest eines Sensors auf die Referenzentfernungen 4 cm ... max. 30 cm Reichweite=== | ||
'''Hinweis:''' Die Messung erfolgt bis maximal 30 cm. Da erstens, für das autonome Einparken die Range von 4 cm - 30 cm relevant ist und zweites die Übersichtlichkeit für die Darstellung der Messignale erhöht wird. <br> | |||
Der Kennlinientest wird durch verschiedene Plots dargestellt, dazu werden sämtliche Ein- und Ausgänge der Simulinkblöcke in der Messkette gegenüber gestellt. Dabei werden die Entfernungen von 4cm, 10cm, 20cm, 25cm und 30cm geprüft. Eine Referenzmessung, die im jeden Plot enthalten ist, spiegelt das ideale Messignal (der zu erwartende Wert) wieder und ist somit der Vergleichswert.<br> | |||
Der Gain in der Messkette wird dabei nicht betrachtet, da dieser den digitalen Wert des ADC mit zehn multipliziert und somit nicht für die weitere Betrachtung relevant ist.<br> | |||
'''Kennlinientest:''' | |||
'''* Darstellung der Funktion des Lookup Tabels''' | |||
<gallery widths="1200" heights="450"> | |||
Datei:Messkette des Sensors yHL.png|Abb. 8: Funktionstest des Lookup Tabels 4 cm bis max. 30 cm Reichweite | |||
</gallery> | |||
In der Abbildung 8 erfolgt die Umwandlung von Spannung in Meter. Das blaue Signal zeigt den Eingang in den Lookup Table und wird durch die Referenzmessung, in rot dargestellt, überprüft. Der Vergleich zeigt, dass bis auf ein paar Ausschläge die Signale übereinstimmen. Des Weiteren wird das Messsignal in Meter (orange) ebenfalls mit einer Referenzmessung, in schwarz dargestellt, verglichen. Sämtliche Messsignale stimmen mit den Referenzmessungen überein. | |||
'''* Darstellung der Funktion des Median Filters''' | |||
<gallery widths="1200" heights="450"> | |||
Datei:Median.jpg|Abb. 9: Funktionstest des Median Filters 4 cm bis max. 30 cm Reichweite | |||
</gallery> | |||
In der Abbildung 9 erfolgt nun die erste Filterung des Messsignales in der Messkette. Das Messsignal wurde bisher ausschließlich in Meter gewandelt, deshalb ist noch kein eindeutiges Signal zu erkennen. Durch den Einsatz des Median Filters, welcher auf eine Länge von 100 Werten eingestellt ist, glättet das Signal ohne es zu ändern, sodass das Signal gleichschnell gewandelt wird und keine Zeit Verzögerung auftritt. | |||
'''* Darstellung der Funktion des PT1 Tiefpassfilter''' | |||
<gallery widths="1200" heights="450"> | <gallery widths="1200" heights="450"> | ||
Datei: | Datei:Pt1.jpg|Abb. 10: Funktionstest des PT1 Filters | ||
Datei:Pt1 zoom.jpg|Abb. 11: Darstellung der Funktionalität des PT1 Filters über eine kürze Zeitdauer | |||
</gallery> | </gallery> | ||
In der Abbildung 10 wird das Messignal, welches von Median Filter kommt, nochmals gefiltert um die Spikes weiter zu reduzieren. Bei der Filterung erfolgt nun eine kleine Zeit Verzögerung, welche in Abbildung 11 zu sehen ist. Dies schränkt jedoch nicht das autonome Einparken ein und ist durch die Reduzierung der Spikes notwendig. | |||
== Liste offener Punkte (LOP) == | == Liste offener Punkte (LOP) == | ||
| Zeile 191: | Zeile 216: | ||
! style="font-weight: bold;" | Dokumentation | ! style="font-weight: bold;" | Dokumentation | ||
|- | |- | ||
| 1 || SenAbs-Block ist schlecht kommentiert || Kommentare wurden bei Erstellung vergessen || Signale benennen, Kommentare einfügen || x || || | | 1 || SenAbs-Block ist schlecht kommentiert || Kommentare wurden bei Erstellung vergessen || Signale benennen, Kommentare einfügen || x ||[[AF:_Abstandssensorik_(SenAbs)#Wirksamkeit der Änderungen|Wirksamkeit der Änderungen]]||[[AF:_Abstandssensorik_(SenAbs)#Sensorblock - SenAbs|Sensorblock - SenAbs]] | ||
|- | |- | ||
| 2 || IR Abstand berechnen wird nicht verwendet|| Toter Code || löschen || x || || | | 2 || IR Abstand berechnen wird nicht verwendet|| Toter Code || löschen || x ||[[AF:_Abstandssensorik_(SenAbs)#Wirksamkeit der Änderungen|Wirksamkeit der Änderungen]]||[[AF:_Abstandssensorik_(SenAbs)#Sensorblock - SenAbs|Sensorblock - SenAbs]] | ||
|- | |- | ||
| 3 || FilterIRSpikes komplexer m-Code|| Code zu komplex || Ersetzen durch Simulink-Median-Block || x || || | | 3 || FilterIRSpikes komplexer m-Code|| Code zu komplex || Ersetzen durch Simulink-Median-Block || x ||[[AF:_Abstandssensorik_(SenAbs)#Wirksamkeit der Änderungen|Wirksamkeit der Änderungen]]||[[AF:_Abstandssensorik_(SenAbs)#Sensorblock - SenAbs|Sensorblock - SenAbs]] | ||
|- | |- | ||
| 4 || PT1 || Doppelte Filterung sorgt nicht für verbessertes Signal|| PT1 löschen und lediglich Medianfilterung verwenden || x || || | | 4 || PT1 || Doppelte Filterung sorgt nicht für verbessertes Signal|| PT1 löschen und lediglich Medianfilterung verwenden || x ||[[AF:_Abstandssensorik_(SenAbs)#Wirksamkeit der Änderungen|Wirksamkeit der Änderungen]]||[[AF:_Abstandssensorik_(SenAbs)#Signalanalyse|Signalanalyse]] | ||
|- | |- | ||
| 5 || Knicks in Lookup-Table || Nicht genügend Messwerte in Lookup tabel aufgenommen || Unkritisch da Knick kaum Einfluss auf das Einparken des Fahrzeugs hat || || || | | 5 || Knicks in Lookup-Table || Nicht genügend Messwerte in Lookup tabel aufgenommen || Unkritisch da Knick kaum Einfluss auf das Einparken des Fahrzeugs hat || ||[[AF:_Abstandssensorik_(SenAbs)#Wirksamkeit der Änderungen|Wirksamkeit der Änderungen]]||[[AF:_Abstandssensorik_(SenAbs)#Signalanalyse|Signalanalyse]] | ||
|- | |- | ||
| 6 || Namensgebung yHR und xHR sind vertauscht || Fehler bei Erstellung des Skripts|| Signale korrekt umbenennen || x || || | | 6 || Namensgebung yHR und xHR sind vertauscht || Fehler bei Erstellung des Skripts|| Signale korrekt umbenennen || x ||[[AF:_Abstandssensorik_(SenAbs)#Wirksamkeit der Änderungen|Wirksamkeit der Änderungen]]||[[AF:_Abstandssensorik_(SenAbs)#Sensorblock - SenAbs|Sensorblock - SenAbs]] | ||
|- | |- | ||
| 7 || Sensor xHR ist nicht immer funktionstüchtig || Unbekannt evtl. Wackelkontakt || Elektrisches Signal nachmessen wenn Sensor nicht funktioniert um Hardwarefehler auszuschließen || x || || | | 7 || Sensor xHR ist nicht immer funktionstüchtig || Unbekannt evtl. Wackelkontakt || Elektrisches Signal nachmessen wenn Sensor nicht funktioniert um Hardwarefehler auszuschließen || x ||[[AF:_Abstandssensorik_(SenAbs)#Wirksamkeit der Änderungen|Wirksamkeit der Änderungen]]||[[AF:_Abstandssensorik_(SenAbs)#Signalanalyse|Signalanalyse]] | ||
|- | |- | ||
| 8 || Alle Sensoren messen laut Abb. 7 falsch || | | 8 || Alle Sensoren messen laut Abb. 7 falsch || Lookup Tabel ungenau || Anpassung der Lookup Tabels || ||[[AF:_Abstandssensorik_(SenAbs)#Wirksamkeit der Änderungen|Wirksamkeit der Änderungen]]||[[AF:_Abstandssensorik_(SenAbs)#Signalanalyse|Signalanalyse]] | ||
|- | |- | ||
| 9 || Ultraschall Sensorik ist am Fahrzeug nicht installiert || Toter Code || Simulink Modell bereinigen (Ultraschallsensorik löschen) || x || || | | 9 || Ultraschall Sensorik ist am Fahrzeug nicht installiert || Toter Code || Simulink Modell bereinigen (Ultraschallsensorik löschen) || x ||[[AF:_Abstandssensorik_(SenAbs)#Wirksamkeit der Änderungen|Wirksamkeit der Änderungen]]||[[AF:_Abstandssensorik_(SenAbs)#Sensorblock - SenAbs|Sensorblock - SenAbs]] | ||
|- | |- | ||
|} | |} | ||
| Zeile 219: | Zeile 244: | ||
* Dokumentation: Doku der Lösung im HSHL-Wiki | * Dokumentation: Doku der Lösung im HSHL-Wiki | ||
== Wirksamkeit der Änderungen== | ==Wirksamkeit der Änderungen== | ||
<gallery widths="1200" heights="450"> | {| role="presentation" class="wikitable mw-collapsible mw-collapsed" | ||
Datei:Messkette IR.png|Abb. 8: Inhalt von SenAbs - Abstandssensorik nach der Bearbeitung der LOP | | <strong> Beschreibung der Wirksamkeit und Umsetzung der Änderungen</strong> | ||
</gallery> | |- | ||
|<gallery widths="1200" heights="450"> Datei:Messkette IR.png|Abb. 8: Inhalt von SenAbs - Abstandssensorik nach der Bearbeitung der LOP </gallery> | |||
Am Anfang der Umsetzung erfolgte die Umsetzung der Punktes zwei und neun (siehe Tabelle 7), dadurch ist die Übersichtlichkeit des Modells deutlich gestiegen. <br> | Am Anfang der Umsetzung erfolgte die Umsetzung der Punktes zwei und neun (siehe Tabelle 7), dadurch ist die Übersichtlichkeit des Modells deutlich gestiegen. <br> | ||
Daraufhin folgte das Ersetzen des Simulink Blocks FilterIRSpikes, durch einen Median Filter mit einer Länge von 100 Werten. Dieser Wert wurde Aufgrund des hervorragenden Messsignales ausgewählt. Die Reaktionszeit des Signals durch den Median Filter ist, wie in Abbildung 9 zu sehen, deutlich gestiegen und eignet sich somit besser für das autonome Einparken. Ein Nachteil ist jedoch, dass das Messignal kleine Spikes aufweist und das Ausgangssignal eine dauerhafte minimale Messungenauigkeit bekommt. In Verbindung mit dem PT1 Filter konnten die Spikes reduziert werden ohne die Reaktionszeit zu beeinträchtigen, weshalb dieser nach dem Median Filter zum Einsatz kommt und nicht wie im Punkt 4 der Tabelle 7 gelöscht wird. Die beschriebene höhere Messungenauigkeit durch die kleinen Spikes im Messsignal beträgt wenige Millimeter. <br> | |||
Daraufhin folgte das Ersetzen des Simulink Blocks FilterIRSpikes, durch einen Median Filter mit einer Länge von 100 Werten. Dieser Wert wurde Aufgrund des hervorragenden Messsignales ausgewählt. Die Reaktionszeit des Signals durch den Median Filter ist, wie in Abbildung 9 zu sehen, deutlich gestiegen und eignet sich somit besser für das autonome Einparken. Ein Nachteil ist jedoch, dass das Messignal kleine Spikes aufweist und das Ausgangssignal eine dauerhafte minimale Messungenauigkeit bekommt. In Verbindung mit dem PT1 Filter konnten die Spikes reduziert, siehe Abbildung 11 werden ohne die Reaktionszeit zu beeinträchtigen, weshalb dieser nach dem Median Filter zum Einsatz kommt und nicht wie im Punkt 4 der Tabelle 7 gelöscht wird. Die beschriebene höhere Messungenauigkeit durch die kleinen Spikes im Messsignal beträgt wenige Millimeter bei einer Entfernung von 15cm. Bei größeren Entfernungen (über 30cm) kann die Abweichung auch wenige Zentimeter betragen. Bei größeren Messentfernungen wird auch durch die Farbe des zu messenden Objekts das Messergebnis stärker beeinflusst. <br> | |||
Die nachfolgende Grafik (Abb. 9) stellt die alte und die neue Messkette gegenüber. Bei der Grafik ist zu beachten, dass durch die Änderung der Messkette die einzelnen Signale verändert wurden. Auch wurden die Signalnamen umbenannt, um diese zu vereinheitlichen. Daher ist lediglich das Ausgangssignal an den Referenzlinien direkt miteinander vergleichbar (Gelbe Linie). <br> | Die nachfolgende Grafik (Abb. 9) stellt die alte und die neue Messkette gegenüber. Bei der Grafik ist zu beachten, dass durch die Änderung der Messkette die einzelnen Signale verändert wurden. Auch wurden die Signalnamen umbenannt, um diese zu vereinheitlichen. Daher ist lediglich das Ausgangssignal an den Referenzlinien direkt miteinander vergleichbar (Gelbe Linie). <br> | ||
<gallery widths="1200" heights="450"> | <gallery widths="1200" heights="450"> | ||
Datei:KennlinientestNeu.jpg|Abb. 9: Kennlinientest (Vergleich von vorher zu nacher) | Datei:KennlinientestNeu.jpg|Abb. 9: Kennlinientest (Vergleich von vorher zu nacher) | ||
Datei:FunktionstestNeu.jpg|Abb. 10: Funktionstest (Vergleich von vorher zu nacher) | Datei:FunktionstestNeu.jpg|Abb. 10: Funktionstest (Vergleich von vorher zu nacher) | ||
</gallery> | </gallery> | ||
In Abbildung 10 ist das Ergebnis der Anpassung des Lookup-Tabels gezeigt. Gemessen wurde dabei mit einer Entfernung von 15cm bei allen vier Sensoren. Zu sehen ist eine deutliche Verbesserung der Messgenauigkeit bei allen Sensoren. | In Abbildung 10 ist das Ergebnis der Anpassung des Lookup-Tabels gezeigt. Gemessen wurde dabei mit einer Entfernung von 15cm bei allen vier Sensoren. Zu sehen ist eine deutliche Verbesserung der Messgenauigkeit bei allen Sensoren. | ||
| Zeile 240: | Zeile 267: | ||
Nachdem die Liste der offenen Punkte (siehe Tabelle 7) bearbeitet wurde, ist das Simulink Modell der Abstandssensorik komplett beschrieben (siehe Abbildung 8) und das Ausgangssignal entspricht der Referenzmessung (siehe Abbildung 9 und 10). | Nachdem die Liste der offenen Punkte (siehe Tabelle 7) bearbeitet wurde, ist das Simulink Modell der Abstandssensorik komplett beschrieben (siehe Abbildung 8) und das Ausgangssignal entspricht der Referenzmessung (siehe Abbildung 9 und 10). | ||
<gallery widths="1200" heights="450"> | |||
Datei:MedianPt1.jpg|Abb. 11: Vergleich von Medianfilter in Verbindung mit dem PT1 Filter | |||
</gallery> | |||
Die Plots, sowie die dazugehörigen Matlab Skripte sind [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Workshops/Abgaben/NiklasReeker%20&%20OliverScholze/Abstandssensorik%20test/ hier] in SVN zu finden. | Die Plots, sowie die dazugehörigen Matlab Skripte sind [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Workshops/Abgaben/NiklasReeker%20&%20OliverScholze/Abstandssensorik%20test/ hier] in SVN zu finden. | ||
|} | |||
== Zusammenfassung == | == Zusammenfassung == | ||
Nach der Überarbeitung des Messkette ist die Signalverarbeitung für das autonome Einparken optimiert. Das Ausgangssignal sämtlicher Sensoren in dem Simulinkmodell liefern nun den korrekten Abstandswert. Das Signal wird zudem in dem Modellerst in konkrete spannungswerte umgerechnet bevor sie dann im Lookup-Tabel in Digitalwerte gewandelt werden. Die anschließende Filterung von Median und PT1 Filter sorgen dafür, dass Messfehler sowie Spikes im Signal entfernt werden. Ein abschließender Test im Trunk am Fahrzeug hat die Wirksamkeit der Änderungen referenziert. | |||
== Datenblätter == | == Datenblätter == | ||
Aktuelle Version vom 18. Mai 2023, 10:40 Uhr
Autoren: Niklas Reeker & Oliver Scholze

Primärsensor
In dem Fahrzeug sind vier Infrarotsensoren verbaut um beim Einparken des Fahrzeugs den Abstand zu verschiedenen Objekten zu messen. In diesem Fall ist der Sensor Sharp GP2D120 verbaut. Weitere Informationen zu diesem Sensor sind in dem Artikel Infrarotsensoren und im Datenblatt im Web[1] oder im SVN[2] zu finden.
Messkette

Die Messkette fängt am Infrarotsensor an. Der gemessene Abstand wird vom Sensor über das gelbe Signalkabel in Volt an die DSpace Karte übermittelt. Danach erfolgt die Messkette wie in Abbildung 02 zu sehen. Das elektrische Signal von IR-Sensor wird vom ADC in ein digitales Signal gewandelt und wird daraufhin mit 10 multipliziert um die Spannung in Volt als digitales Signal darzustellen. Darauf folgt die Umwandlung der Spannung in ein Abstandsmaß in Meter, dies wird durch die Lookup Tabel erreicht. Nun beginnt die Glättung des Messignales, die durch einen Median Filter und einen PT1 Tiefpassfilter realisiert wird. Nach der Glättung und somit der Filterung der Spikes, kann das Messignal am Ausgang (grün Dargestellt) entnommen werden.
Systementwurf
Einbauposition
Die genaue Position der Infrarotsensoren wird in der folgenden Tabelle (Positionsbestimmung durchgeführt am 25.04.2023) dargestellt und lässt sich durch das Fahrzeugkoordinatensystem in Abb. 04 nachverfolgen:
| IR_Sensor | x-Position | y-Position |
|---|---|---|
| xVR (rechts vorne) | -2.5 cm | -10 cm |
| xHR (rechts hinten) | -31 cm | -10 cm |
| yHR (hinten links) | -36 cm | -9 cm |
| yHL (hinten rechts) | -36 cm | 9 cm |

Sensoranschlussplan
Der Sensoranschlussplan, welcher der Tabelle zu entnehmen ist, beschreibt die Pinbelegung des Sensors anhand der Farbe des Kabels. Des Weiteren werden die Anschlusspins der DSpace Karte aufgeführt die im nächsten Unterpunkt spezifiziert werden.
| PIN | Farbe des Kabels | Pin am Sensor | DS1104-Pin |
|---|---|---|---|
| 1 | Gelb | Sensor_IR_V0 | ADCH5 … 8 |
| 2 | Orange | Sensor_IR_GND | GND |
| 3 | Rot | Sensor_IR_VCC | '-0,3 V ... +7 V |
Analoge Signalverarbeitung
Um das analoge Signal digital zu verarbeiten, wird ein Analog-Digital-Umsetzer verwendet. Durch den ADU werden Spannungen in bestimmten diskreten Stufen wahrgenommen. Diese Spannungsstufen werden im Fall der DSPACE Karte, in dem ein 12-Bit Wandler verbaut ist, in Spannungsstufen unterteilt. Dabei hat eine Spannungsstufe, die durch den maximalen Eingang am ADC von 10 V, eine Breite/Auflösung von: .
Schnittstelle zur DS1104
- Pinbelegung/Anschlussplan
| Sensor Pin | Belegung | Farbe | Sensorposition | Anschluss auf der Adapterplatine | Anschluss auf DS1104 (Eingangssignal) | Ausgangssignal |
|---|---|---|---|---|---|---|
| 1 | Ausgang | Gelb | rechts vorne | J21_IR_V | P1A-46_ADCH5 | SenAbs_xVR_K_f64
|
| 1 | Ausgang | Gelb | rechts hinten | J22_IR_H | P1B-46_ADCH6 | SenAbs_xHR_K_f64
|
| 1 | Ausgang | Gelb | hinten links | J20_IR_HL | P1B-44 ADCH8 | SenAbs_yHL_K_f64
|
| 1 | Ausgang | Gelb | hinten rechts | J19_IR_HR | P1A-44_ADCH7 | SenAbs_yHR_K_f64
|
| 2 | Masse (GND) | Schwarz | ||||
| 3 | Versorgungsspannung VCC | Rot |
Sensorblock - SenAbs
-
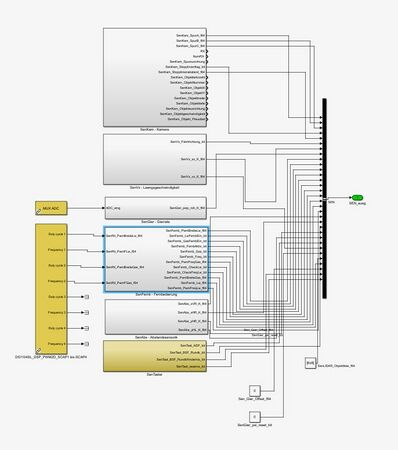 Abb. 4: SenAbs - Abstandssensorik
Abb. 4: SenAbs - Abstandssensorik -
 Abb. 5: Inhalt von SenAbs - Abstandssensorik
Abb. 5: Inhalt von SenAbs - Abstandssensorik


Die Signalverarbeitung erfolgt ausschließlich im Block SEN.
In der Abbildung 04 wird die Lage der SenAbs - Abstandssensorik (unter den blau Makierten Block) abgebildet, dieser hat keine Eingangsparameter.
Die darauffolgende Abbildung 05 zeigt die Signalverarbeitung im Block SenAbs - Abstandssensorik. Die Beschreibung findet sich in der nachfolgenden Tabelle:
| Simulink Block | Funktion |
|---|---|
| DS1104ADC_C5 ... C8 | Ist der Ausgang gewandelter analoger Signale in digitale Signale. |
| Gain | Multiplikator benötigt, da D1104 Spannungswerte durch 10 teilt. |
| Lookup Table | Lookuptabel zum Umwandeln der analogen Spannungswerte in einen digitalen Wert in Meter. |
| Median Filter | Median Filterung zum entfernen der Spikes im Messsignal. |
| PT1 | PT1 Filterung um Spikes weiter zu glätten. |
| IR_Sensor | ADC zu Gain | Gain zu Lookup Table | Lookup Table zu Median Filter | Median Filter zu PT1 | PT1 zum Ausgang |
|---|---|---|---|---|---|
| xVR | SenAbs_ADC_xVR_f64 |
SenAbs_Volt_xVR_f64 |
SenAbs_LookUp_xVR_f64 |
SenAbs_MedianFilter_xVR_f64 |
SenAbs_PT1_xVR_f64
|
| xHR | SenAbs_ADC_xHR_f64 |
SenAbs_Volt_xHR_f64 |
SenAbs_LookUp_xHR_f64 |
SenAbs_MedianFilter_xHR_f64 |
SenAbs_PT1_xHR_f64
|
| yHR | SenAbs_ADC_yHR_f64 |
SenAbs_Volt_yHR_f64 |
SenAbs_LookUp_yHR_f64 |
SenAbs_MedianFilter_yHR_f64 |
SenAbs_PT1_yHR_f64
|
| yHL | SenAbs_ADC_yHL_f64 |
SenAbs_Volt_yHL_f64 |
SenAbs_LookUp_yHL_f64 |
SenAbs_MedianFilter_yHL_f64 |
SenAbs_PT1_yHL_f64
|
Die Tabelle zeigt die Signale, die man in ControlDesk auswählen muss um alle Daten aus der Messkette mitzuschneiden.
Signalanalyse
Die Signalanalyse umfasst einen Funktionstest aller vier Sensoren auf eine bestimmte Referenzentfernung und anhand eines Sensors werden sämtliche Ein- und Ausgangsignale der Signalverarbeitungsblöcke dargestellt (vgl. Messkette).
Vorgehensweise bei der Messung
-
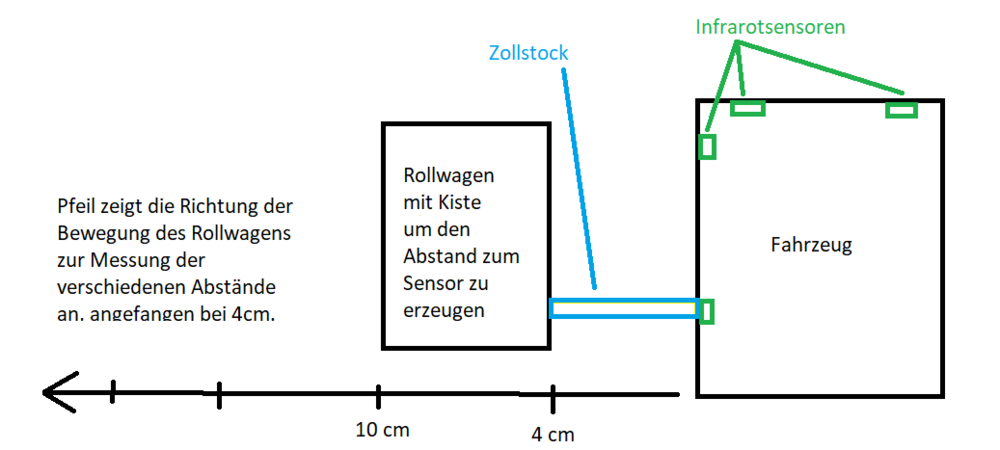 Abb. 6: Messaufbau für den Funktionstest und die Darstellung der Messkette
Abb. 6: Messaufbau für den Funktionstest und die Darstellung der Messkette

Hilfsmittel:
- Zollstock
- Rollwagen
- Karton (Messobjekt)
Für den Funktionstest aller vier Sensoren wird ein Messobjektauf eine Entfernung von 15 cm vom jeweiligen Sensor aufgestellt. Daraufhin erfolgt die Messung mit ControlDesk und der Konvertierung der Messdaten in Matlab. Die Auswertung der Messdaten ist in Abbildung 8 dargestellt.
Für die Darstellung der Messkette, werden Messobjekte auf verschieden Entfernungen zum Sensor gemessen. Verwendet wurde dabei der IR-Sensor yHL. Es wurde ein Messobjekt auf einem Rollwagen montiert, welches leicht in die passende Entfernung bewegt werden konnte. Die Messung erfolgte somit kontinuierlich, von der geringsten Entfernung bis zur maximalen messbaren und logischen Entfernung (siehe Artikel des Primärsensors) des Infrarotsensors. An den in der Tabelle 6 angegebenen Messentfernungen wurde jeweils kurz die Entfernung gleich gelassen bevor man zur nächsten Entfernung weitergegangen ist. Alle weiteren Informationen zur Messung befinden sich in der Tabelle 6 Messdatenbeschreibung.
| Beschreibung | Referenzentfernungen | Dateiname | Signalnamen |
|---|---|---|---|
| Funktionstest der x-IR-Sensoren | 15 cm | 2023_04_18_IR_Test002.mat | SenAbs_xVR_K_f64 SenAbs_xHR_K_f64
|
| Funktionstest der y-IR-Sensoren | 15 cm | 2023_04_18_IR_Test003.mat | SenAbs_yHL_K_f64 SenAbs_yHR_K_f64
|
| Messkette des Sensors xVR | 4, 10, 20, 25, 30 cm | 2023_04_18_IR_Test006.mat | Signalnamen für xVR aus der Tabelle 5 |
Funktionstest aller 4 Sensoren auf Referenzentfernung 15 cm
-
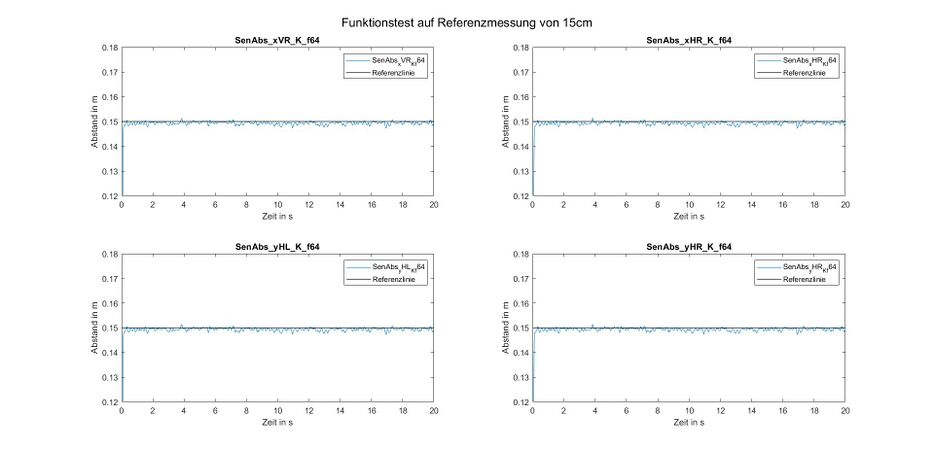 Abb. 7: Funktionstest aller vier Sensoren
Abb. 7: Funktionstest aller vier Sensoren

Der Funktionstest der vier Sensoren wurde bei einen Abstand von 15 cm durchgeführt, in der Abbildung 07 sind die vier Sensoren dargestellt. Die Plots zeigen eine schwarze Referenzlinie bei 15 cm und die gemessenen Werte in blau. Die gemessen Werte wurden am Ausgang der Messkette abgegriffen und über Controldesk gespeichert. Die Messwerte zeigen, dass nach der Überarbeitung der Messkette sämtliche Werte mit der Referenzmessung übereinstimmen.
Kennlinientest eines Sensors auf die Referenzentfernungen 4 cm ... max. 30 cm Reichweite
Hinweis: Die Messung erfolgt bis maximal 30 cm. Da erstens, für das autonome Einparken die Range von 4 cm - 30 cm relevant ist und zweites die Übersichtlichkeit für die Darstellung der Messignale erhöht wird.
Der Kennlinientest wird durch verschiedene Plots dargestellt, dazu werden sämtliche Ein- und Ausgänge der Simulinkblöcke in der Messkette gegenüber gestellt. Dabei werden die Entfernungen von 4cm, 10cm, 20cm, 25cm und 30cm geprüft. Eine Referenzmessung, die im jeden Plot enthalten ist, spiegelt das ideale Messignal (der zu erwartende Wert) wieder und ist somit der Vergleichswert.
Der Gain in der Messkette wird dabei nicht betrachtet, da dieser den digitalen Wert des ADC mit zehn multipliziert und somit nicht für die weitere Betrachtung relevant ist.
Kennlinientest: * Darstellung der Funktion des Lookup Tabels
-
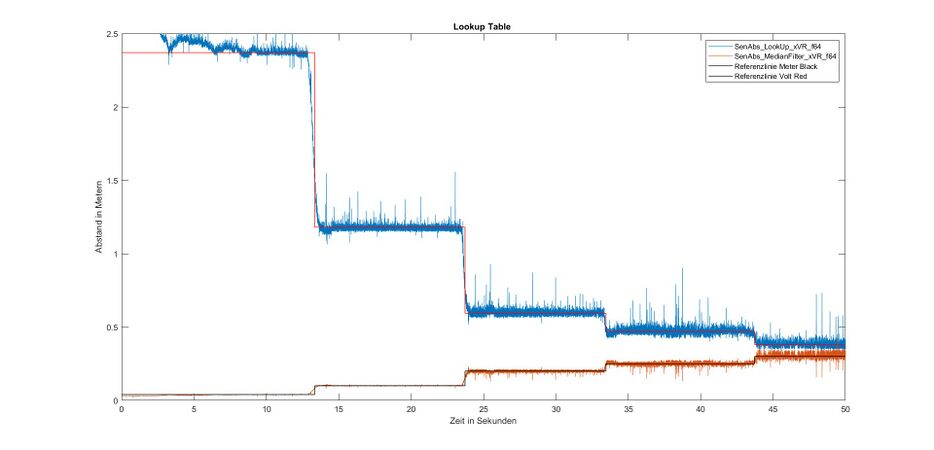 Abb. 8: Funktionstest des Lookup Tabels 4 cm bis max. 30 cm Reichweite
Abb. 8: Funktionstest des Lookup Tabels 4 cm bis max. 30 cm Reichweite

In der Abbildung 8 erfolgt die Umwandlung von Spannung in Meter. Das blaue Signal zeigt den Eingang in den Lookup Table und wird durch die Referenzmessung, in rot dargestellt, überprüft. Der Vergleich zeigt, dass bis auf ein paar Ausschläge die Signale übereinstimmen. Des Weiteren wird das Messsignal in Meter (orange) ebenfalls mit einer Referenzmessung, in schwarz dargestellt, verglichen. Sämtliche Messsignale stimmen mit den Referenzmessungen überein.
* Darstellung der Funktion des Median Filters
-
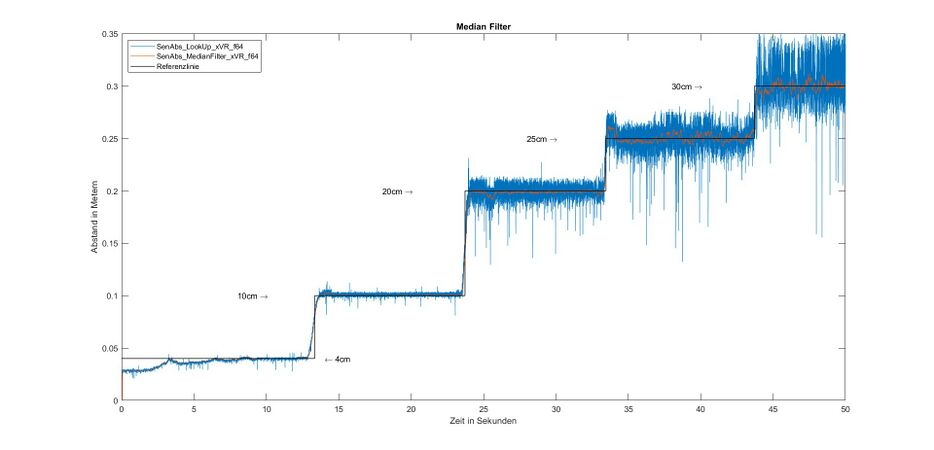 Abb. 9: Funktionstest des Median Filters 4 cm bis max. 30 cm Reichweite
Abb. 9: Funktionstest des Median Filters 4 cm bis max. 30 cm Reichweite

In der Abbildung 9 erfolgt nun die erste Filterung des Messsignales in der Messkette. Das Messsignal wurde bisher ausschließlich in Meter gewandelt, deshalb ist noch kein eindeutiges Signal zu erkennen. Durch den Einsatz des Median Filters, welcher auf eine Länge von 100 Werten eingestellt ist, glättet das Signal ohne es zu ändern, sodass das Signal gleichschnell gewandelt wird und keine Zeit Verzögerung auftritt.
* Darstellung der Funktion des PT1 Tiefpassfilter
-
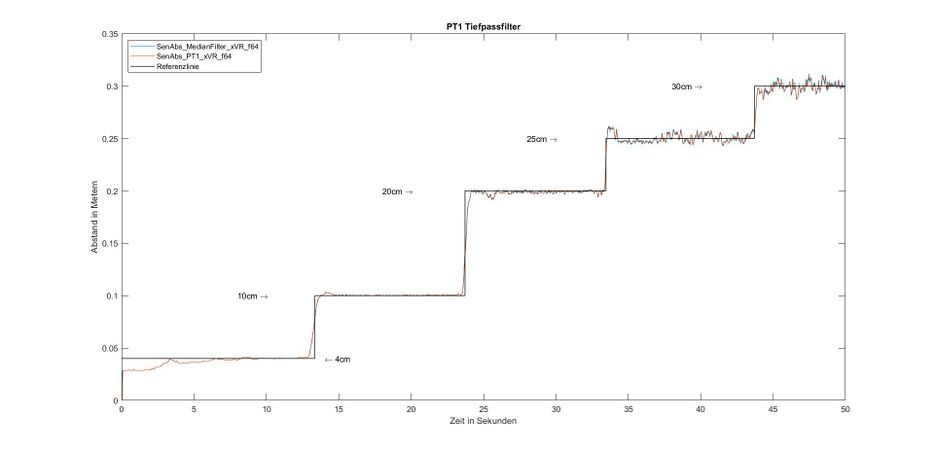 Abb. 10: Funktionstest des PT1 Filters
Abb. 10: Funktionstest des PT1 Filters -
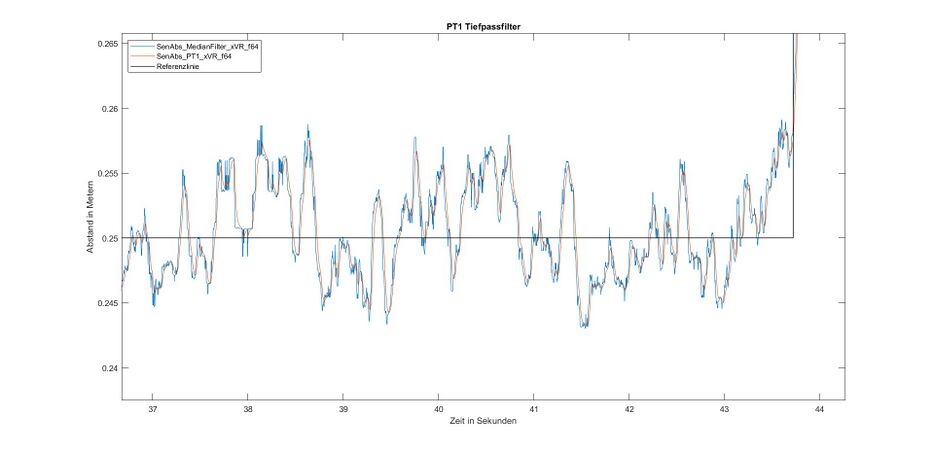 Abb. 11: Darstellung der Funktionalität des PT1 Filters über eine kürze Zeitdauer
Abb. 11: Darstellung der Funktionalität des PT1 Filters über eine kürze Zeitdauer


In der Abbildung 10 wird das Messignal, welches von Median Filter kommt, nochmals gefiltert um die Spikes weiter zu reduzieren. Bei der Filterung erfolgt nun eine kleine Zeit Verzögerung, welche in Abbildung 11 zu sehen ist. Dies schränkt jedoch nicht das autonome Einparken ein und ist durch die Reduzierung der Spikes notwendig.
Liste offener Punkte (LOP)
| # | Problem | Analyse | Maßnahme | Freigabe | Wirksamkeit | Dokumentation |
|---|---|---|---|---|---|---|
| 1 | SenAbs-Block ist schlecht kommentiert | Kommentare wurden bei Erstellung vergessen | Signale benennen, Kommentare einfügen | x | Wirksamkeit der Änderungen | Sensorblock - SenAbs |
| 2 | IR Abstand berechnen wird nicht verwendet | Toter Code | löschen | x | Wirksamkeit der Änderungen | Sensorblock - SenAbs |
| 3 | FilterIRSpikes komplexer m-Code | Code zu komplex | Ersetzen durch Simulink-Median-Block | x | Wirksamkeit der Änderungen | Sensorblock - SenAbs |
| 4 | PT1 | Doppelte Filterung sorgt nicht für verbessertes Signal | PT1 löschen und lediglich Medianfilterung verwenden | x | Wirksamkeit der Änderungen | Signalanalyse |
| 5 | Knicks in Lookup-Table | Nicht genügend Messwerte in Lookup tabel aufgenommen | Unkritisch da Knick kaum Einfluss auf das Einparken des Fahrzeugs hat | Wirksamkeit der Änderungen | Signalanalyse | |
| 6 | Namensgebung yHR und xHR sind vertauscht | Fehler bei Erstellung des Skripts | Signale korrekt umbenennen | x | Wirksamkeit der Änderungen | Sensorblock - SenAbs |
| 7 | Sensor xHR ist nicht immer funktionstüchtig | Unbekannt evtl. Wackelkontakt | Elektrisches Signal nachmessen wenn Sensor nicht funktioniert um Hardwarefehler auszuschließen | x | Wirksamkeit der Änderungen | Signalanalyse |
| 8 | Alle Sensoren messen laut Abb. 7 falsch | Lookup Tabel ungenau | Anpassung der Lookup Tabels | Wirksamkeit der Änderungen | Signalanalyse | |
| 9 | Ultraschall Sensorik ist am Fahrzeug nicht installiert | Toter Code | Simulink Modell bereinigen (Ultraschallsensorik löschen) | x | Wirksamkeit der Änderungen | Sensorblock - SenAbs |
Legende
- Problem: Was genau ist das Problem? Wo tritt das Problem auf? Wie zeigt sich das Problem? Wann tritt das Problem auf? Warum ist es ein Problem?
- Analyse: Was ist die Ursache des Problems?
- Maßnahme: Maßnahme zur Beseitigung der identifizierten Ursache
- Freigabe: Abstimmung der Maßnahme mit Prof. Schneider
- Wirksamkeit: Beschreibung Nachweis Wirksamkeit (Dummy-Prüfung, Versuche, Kurzzeitfähigkeit, Kennzahlen, Audit, etc.)
- Dokumentation: Doku der Lösung im HSHL-Wiki
Wirksamkeit der Änderungen
| Beschreibung der Wirksamkeit und Umsetzung der Änderungen |
Am Anfang der Umsetzung erfolgte die Umsetzung der Punktes zwei und neun (siehe Tabelle 7), dadurch ist die Übersichtlichkeit des Modells deutlich gestiegen.
Die nachfolgende Grafik (Abb. 9) stellt die alte und die neue Messkette gegenüber. Bei der Grafik ist zu beachten, dass durch die Änderung der Messkette die einzelnen Signale verändert wurden. Auch wurden die Signalnamen umbenannt, um diese zu vereinheitlichen. Daher ist lediglich das Ausgangssignal an den Referenzlinien direkt miteinander vergleichbar (Gelbe Linie).
In Abbildung 10 ist das Ergebnis der Anpassung des Lookup-Tabels gezeigt. Gemessen wurde dabei mit einer Entfernung von 15cm bei allen vier Sensoren. Zu sehen ist eine deutliche Verbesserung der Messgenauigkeit bei allen Sensoren. Es erfolgte die Bearbeitung der Lookup-Tabels, da dass Messignal zu Beginn nicht immer den Referenzabständen entsprach. Zudem wurde die Messkette mit einem Gain von 10 erweitert, da die D1104 die Spannungswerte an den Analogeingängen durch 10 teilt. Aus diesem Grund wird ein Gain von 10 in dem Modell (Vgl. Abb. 8) verwendet, sodass die Messwerte im Modell wieder den echten Spannungswerten vom Sensor entsprechen. Für die Übersichtlichkeit und Nachverfolgbarkeit von Signalen erfolgte eine eindeutige Namensgebung. Zudem wurden die Blöcke in der Messkette benannt und die Funktion beschrieben. Nachdem die Liste der offenen Punkte (siehe Tabelle 7) bearbeitet wurde, ist das Simulink Modell der Abstandssensorik komplett beschrieben (siehe Abbildung 8) und das Ausgangssignal entspricht der Referenzmessung (siehe Abbildung 9 und 10).
Die Plots, sowie die dazugehörigen Matlab Skripte sind hier in SVN zu finden. |




Zusammenfassung
Nach der Überarbeitung des Messkette ist die Signalverarbeitung für das autonome Einparken optimiert. Das Ausgangssignal sämtlicher Sensoren in dem Simulinkmodell liefern nun den korrekten Abstandswert. Das Signal wird zudem in dem Modellerst in konkrete spannungswerte umgerechnet bevor sie dann im Lookup-Tabel in Digitalwerte gewandelt werden. Die anschließende Filterung von Median und PT1 Filter sorgen dafür, dass Messfehler sowie Spikes im Signal entfernt werden. Ein abschließender Test im Trunk am Fahrzeug hat die Wirksamkeit der Änderungen referenziert.
Datenblätter
Der Hersteller Sharp stellt Datenblätter zu dem Sensor bereit. Diese sind sowohl in SVN[2] als auch im Web[1] abrufbar.
Literatur
- Stefan Hesse, Gerhard Schnell: Sensoren für die Prozess- und Fabrikautomation. Wiesbaden 2018, ISBN 978-3-658-21173-8, S. 78–80, 371f.
Einzelnachweis
Dokumentation in SVN
Die Messdaten, sowie die für die Auswertung verwendeten Matlabskripte können hier in SVN aufgerufen werden.
→ zurück zum Hauptartikel: Praktikum SDE | SDE-Team 2023/24 | Lernzielkontrolle 1