Sound Sensor Modul KY-038: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (50 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
'''Autor:''' [[Benutzer: Hendrik_Steffen | Hendrik Steffen]]<br/> | |||
'''Betreuer:''' [[Benutzer:Ulrich_Schneider| Prof. Schneider]]<br/> | |||
→ zurück zum Hauptartikel: [[ST WS2020|Sensortechnik WS 20/21]] | |||
[[Datei:Bild_Sound_Sensor.JPG|500px|thumb|rechts|Abbildung 1: Sound Sensor Modul <ref> https://www.az-delivery.de/products/mikrofon-modul-klein </ref>]] | |||
==Aufgabe== | |||
Vertiefend zu den Vorlesungen der Lehrveranstaltung Sensortechnik aus dem Schwerpunkt System Design Engineering besteht die Aufgabe einen beliebigen Sensor mithilfe eines Arduino Uno Boards in Betrieb zu nehmen. Zusätzlich wird in diesem Artikel der Weg vom Sensor, über den elektrischen Aufbau und die Programmierung bis hin zu brauchbaren Messergebnissen beschrieben. <br> | |||
In diesem Semester ersetzt diese Hausarbeit die Klausur für diese Lehrveranstaltung. <br> | |||
==Einleitung== | ==Einleitung== | ||
Die Lehrveranstaltung Sensortechnik gehört zum Studienschwerpunkt System Design Engineering im 5. Semester des Studienganges Mechatronik. | |||
<br><br> | |||
In diesem Artikel wird im Folgenden ein Sound Sensor Modul (KY-038 beschrieben). Auf dem oben dargestellten Foto ist das Sound Sensor Modul abgebildet. Auf diesem Modul ist der eigentliche Sensor montiert. Dies ist ein sogenanntes Kondensatormikrofon, das mit eintreffenden Schallwellen die Kapazität des Kondensators ändert. Auf dem Modul ist dann bereits eine Auswerteschaltung realisiert, die im Folgenden ebenfalls erläutert wird. <br> | |||
== | == Technische Daten == | ||
Tabelle mit den technischen Daten des Kondensatormikrofons | |||
{| class="mw-datatable" | |||
! style="font-weight: bold;" | Typ | |||
! style="font-weight: bold;" | Wert | |||
|-align="left" | |||
|Empfindlichkeit || -46db +-3 | |||
|-align="left" | |||
| Richtwirkung || Omnidirektional | |||
|-align="left" | |||
| Stromverbrauch|| max. 0.5 mA | |||
|-align="left" | |||
|Betriebsspannung || 1.5-10V | |||
|-align="left" | |||
|Betriebstemperatur || -10°C - 45°C | |||
|-align="left" | |||
|Lagertemperatur|| -20°C- 60°C | |||
|} | |||
<br/> | |||
Beschreibung der Pins am Sound Sensor Modul <br> | |||
{| class="mw-datatable" | |||
! style="font-weight: bold;" | PIN | |||
! style="font-weight: bold;" | Beschreibung | |||
|-align="left" | |||
| + || Versorgungsspannung (5V, 3.3V) | |||
|-align="left" | |||
| G|| GND | |||
|-align="left" | |||
|A0 || Analog signal output Pin | |||
|-align="left" | |||
|D0|| Digital signal output Pin | |||
|} | |||
== | == Prinziperklärung == | ||
[[Datei:Skizze_Sound_Sensor.png|500px|thumb|links|Abbildung 2: Hauptbestandteile des Sound Sensor Moduls <ref> Eigene Zeichnung </ref>]] | |||
Bei dem Sound Sensor Modul handelt es sich um ein Modul, dass im Wesentlichen aus 5 Komponenten besteht. Erstens das Kondensatormikrofon, dass die Schallwellen aufnimmt, zweitens ein Potentiometer, mit dem ein Schwellwert für die Empfindlichkeit eingestellt werden kann, drittens einem IC, der als Komparator fungiert, um die Schallwellen mit dem Schwellenwert zu vergleichen und zwei LEDS. Mit der einen LED wird angezeigt wird, ob eine Spannung anliegt und die zweite LED zeigt den digitalen Ausgang an, also ob der Schwellwert überschritten ist oder nicht. In der folgenden Abbildung 2 sind diese Bereiche auf dem Modul einmal dargestellt und beschriftet. | |||
<br><br><br><br><br><br><br><br><br><br><br><br><br> | |||
== | ===Auswahl eines Primärsensors=== | ||
Wie | '''Wie funktioniert der Sensor? ''' <br> | ||
Der eigentliche Sensor ist ein Kondensatormikrofon genauer gesagt handelt es sich um ein Elektret Mikrofon. Diesen Sensor kann man somit der Gruppe der kapazitiven EMS Sensoren zuordnen. | |||
Das Mikrofon besteht aus zwei Platten, die einen Plattenkondensator bilden. Eine Platte davon ist fest fixiert, die andere Platte ist leicht beweglich. Wenn nun Schallwellen auf die bewegliche Platte treffen, verändert sich der Abstand der Platten zueinander. Anschließend schwingt die Platte wieder zurück, sodass sich eine leichte Schwingung einstellt, die dann gedämpft wid und sich langsam wieder legt. Wenn sich der Plattenabstand ändert, ändert sich auch die Kapazität des Kondensators, und somit ergibt sich auch eine Änderung der Spannung.<br> | |||
Die Spannung am Kondensator berechnet sich wie folgt. <ref> [https://hshl.bsz-bw.de/cgi-bin/koha/opac-detail.pl?biblionumber=5864&query_desc=kw%2Cwrdl%3A%20Sensoren%20f%C3%BCr%20die%20Prozess-%20und%20Fabrikautomation Hesse, S. Schnell, G..: ''Sensoren für die Prozess und Fabrikautomation'' Vieweg & Teubner, 5. Auflage 2012. ISBN: 978-3-8348-0895-0] </ref><br> | |||
<br> | |||
== | <math>U = \frac{Q}{C}</math> mit <math>C = \frac{A\cdot \varepsilon_0\cdot \varepsilon_r}{a} </math> ergibt sich <math>U = \frac {Q \cdot a}{\varepsilon_0 \cdot \varepsilon_r \cdot A}</math> <br> | ||
: <math>U</math> – Spannung am Kondensator in V | |||
: <math>Q</math> – im Kondensator gespeicherte Ladung in As (für kurze Zeiträume als konstant angenommen) | |||
: <math>C</math> – Elektrische Kapazität der Kapsel in F | |||
: <math>a</math> – Abstand von Membran und Gegenelektrode | |||
:<math>\varepsilon_0</math> – Elektrische Feldkonstante | |||
:<math>\varepsilon_r</math> – relative Dielektrizitätskonstante | |||
: <math>A</math> – Feldwirksame Fläche zwischen Membran und Gegenelektrode | |||
==Digitale Signalverarbeitung== | Eine Änderung des Plattenabstands <math>a</math> hat somit eine proportionale Änderung von U in Folge. | ||
Welche Verarbeitungsschritte sind notwendig? | |||
Welche Filter werden angewendet? | '''Besonderheiten beim Aufbau eines Elektret Mikrofons:''' <br> | ||
Bestimmen Sie Auflösung, Empfindlichkeit und Messunsicherheit des Sensors. | |||
Ein Elektret Mikrofon funktioniert wie oben beschrieben ebenfalls durch eine Änderung des Plattenabstandes a. Jedoch hat ein Elektret Mikrofon eine Elektret Membran. Ein Elektret hat elektrische Dipole, die eingefroren werden, somit erzeugen Elektrete ein ständiges elektrisches Feld, was mit dem magnetischen Feld eines Dauermagneten verglichen werden kann. Abbildung 3 zeigt den Aufbau eines Elektret Kondensatormikrofons. <br> | |||
[[Datei:Elektret_Mikrofon.png|500px|thumb|links|Abbildung 3: Aufbau eines Elektret Mikrofons <ref> [https://hshl.bsz-bw.de/cgi-bin/koha/opac-detail.pl?biblionumber=121920 Bernstein, H.: ''Elektroakustik: Mikrofone, Klangstufen, Verstärker, Filterschaltungen und Lautsprecher'' Springer, 2. Auflage 2019] </ref>]] | |||
Statt einer Membran aus Metall wird eine Membran aus einem Elektret verwendet, sodass auf eine Hilfsspannungsquelle verzichtet werden kann. Dies ist neben einer kompakten Bauweise und einem günstigen Preis ein weiterer Vorteil, sodass Elektret Mikrofone oft als Messmikrofone eingesetzt werden. <br> | |||
<br><br><br><br><br><br><br><br><br><br><br><br><br><br> | |||
'''Welche Rohsignale liefert der Sensor? '''<br> | |||
Als Rohsignal liefert der Sensor somit eine Spannung zwischen 0 und 5V, da der Sensor an 5V angeschlossen ist. Allerdings wird die Größe dieser maximalen Spannungsänderung durch das Potentiometer begrenzt. Wenn dies auf einen hohen Widerstand eingestellt ist, ist die Messspanne von dem Kondensator natürlich kleiner, was somit einer geringeren Empfindlichkeit entspricht. Wenn der Widerstand des Potentiometers aber auf einem sehr kleinen Wert steht, fällt die Spannungsänderung am Kondensator höher ins Gewicht, sodass so die Empfindlichkeit des Sensors höher ist. <br> | |||
== Equipment== | |||
===Verwendete Software=== | |||
*Arduino IDE <br> | |||
*Fritzing <br> | |||
===Verwendete Komponenten=== | |||
*Arduino Uno in der Elegoo Edition | |||
*Breadboard | |||
*Sound Sensor Modul KY-038 | |||
*Jumper Kabel | |||
==Messkette== | |||
Die Messkette sieht bei dem mir vorliegenden Sound Sensor Modul folgendermaßen aus. Auf dem Bild in Abbildung 4 sieht man die Schaltung und die Bauteile, die auf der Platine angebracht sind. | |||
[[Datei:Schaltplan_KY_038.jpg|600px|thumb|links|Abbildung 4: Schaltplan des Sound Sensor Moduls <ref> https://easyeda.com/adrirobot/KY_038_Microphone_sound_sensor_module-283a631354c24d129bca349e77da0d18 </ref>]]<br><br> | |||
Es sind folgende Bauteile auf der Platine vorhanden:<br> | |||
* Q1: Kondensatormikrofon | |||
* R2 und R6 Widerstände für den Spannungsteiler | |||
* VR1: Potentiometer um die Empfindlichkeit des Mikrofons einzustellen | |||
* U1.1 und U1.2 zusammen in einem IC (LM393), dient als Komparator, um den digitalen Ausgang zu schalten | |||
* R1: Vorwiderstand für Spannungsteiler | |||
* R4 und R5 Vorwiderstände für die LEDs | |||
* L2: Led für den digitalen Ausgang | |||
* L1: Led für die Spannungsversorgung | |||
<br><br><br><br><br> | |||
===Der Komparator=== | |||
Die beiden Operationsverstärker dienen als sogenannte Komparatoren. Ein Komparator vergleicht den nichtinvertierten Eingang und den invertierten Eingang miteinander. Je nachdem welcher Eingang das höhere Spannungspotential aufweist, wird der Ausgang des Komparators umgeschaltet. Sobald die Eingangsspannung am nichtinvertierten Eingang (+) höher ist als am invertierten Eingang (-) sperren die internen Transistoren den Ausgang. Wenn der Ausgang nun mit einem Vorwiderstand (in diesem Fall ist das R1) verbunden ist, kann ein HIGH Signal abgegriffen werden.<br> | |||
Der anderer Fall, wenn die Spannung an nichtinvertierten Eingang kleiner ist als am invertierten Eingang, leitet der Transistor am Ausgang und es kann ein LOW Impuls abgegriffen werden. <ref> https://www.conrad.de/de/ratgeber/handwerk-industrie-wiki/elektronik-bauteile/lm393.html, Aufruf am 02.01.2021 </ref><br> | |||
Dieses Komparator Prinzip findet bei dem Sound Sensor Modul in dem IC LM 393 zweifach Anwendung. | |||
===Ablauf der Messung=== | |||
Ganz links ist der eigentliche Sensor, das Kondensatormikrofon angebracht. Über einen Spannungsteiler ist dies zusammen mit R3 mit dem Potentiometer verbunden. An dem Potentiometer können dann im Extremfall nahezu 5V abfallen, was die Empfindlichkeit des Sensors auf 0 setzen und somit unbrauchbar machen würde, oder am Potentiometer würde nur sehr wendig Spannung abfallen und der gesamte Rest am Sensor, was diesen sehr empfindlich und machen würde. Hier ein gutes Mittelmaß zu finden, sodass z.B. 2.5V am Potentiometer abfallen und die restlichen 2.5V für die Änderung des Kondensators sind ergibt in diesem Fall am meisten Sinn, da so Schwingungen nach oben und nach unten ermöglicht werden. An diesem Spannungsteiler wird A0 abgegriffen, das wiederum vom Arduino eingelesen werden kann. <br> | |||
Der digitale Ausgang hingegen ist komplizierter aufgebaut. Die beiden Widerstände R6 und R3 bauen einen Spannungsteiler auf. Da die beiden Widerstände gleich groß sind, liegen an den beiden nichtinvertierten Eingängen des Komparators jeweils 2.5V an. Wird nun in das Mikrofon gesprochen, liegt am invertierten Eingang von U1.1 ein kleineres Signal an als die 2.5V die am nichtinvertierten Eingang anliegen. Somit kann ein HIGH Signal am Ausgang abgegriffen werden. Dieses Signal wird dann auch am D0 Ausgang abgegriffen. Dieses HIGH Signal liegt dann am 2. Komparator an. Da dann das Signal am invertierten Eingang größer ist als am nichtinvertierten, kommt am Ausgang ein LOW Signal heraus. Dies wird benötigt, damit die angeschlossenen LED eine Potentialdifferenz von 5V hat um zu leuchten. | |||
Im anderen Fall also bei Stille, sind die 2.5V am nichtinvertierten Eingang des 1. Komparators kleiner als die Spannung am invertierten Eingang, sodass der digitale Ausgang nicht geschaltet wird, und auch die LED2 nicht leuchtet. <br> | |||
Der Ablauf der Messung ist in dem folgenden Flussdiagramm in Abbildung 5 noch einmal kurz zusammengefasst: | |||
[[Datei:Messkette_Sound_Sensor.jpg|700px|thumb|links|Abbildung 5: Messkette Sound Sensor Modul <ref> Eigenes Dokument</ref>]] | |||
<br><br><br><br><br><br><br><br><br><br><br><br><br> | |||
===Signalvorverarbeitung=== | |||
Sollen Messwerte oder vorverarbeitete Daten übertragen werden?<br> | |||
Wie anhand der oben abgebildeten Schaltung erläutert, werden für den Analogen Ausgang die direkten Messwerte aus dem Spannungsteiler abgegriffen, es findet also beim Analogen Ausgang keine Vorverarbeitung statt. <br> | |||
Die Vorverarbeitung jedoch, ist bei dem digitalen Ausgang notwendig. Wie bereits im letzten Abschnitt erläutert, wird mithilfe eines Komparators der Eingang des Mikrofons verglichen und je nach Stärke des Signals der digitale Ausgang auf 0 oder 1 gesetzt. <br> | |||
Wie lässt sich eine Vorverarbeitung umsetzen?<br> | |||
Die Daten bzw. die ankommende Spannung wird mithilfe des Komparators verglichen. Dies ist eine sehr einfache Methode, die aber seinen Zweck erfüllt, aus der Spannungsänderung ein digitales Signal zu generieren, dass dann nur noch zwischen HIGH und LOW unterscheidet.<br> | |||
Wird eine Kennlinie eingesetzt? Wenn ja, wie wird diese kalibriert?<br> | |||
Bei dem Sound Sensor Modul wird keine Kennlinie eingesetzt, da die vom Analog Ausgang abgegriffene Spannungsänderung des Kondensators nur mittelbar mit dem Signal des Kondensators zusammenhängt. Da das Potentiometer hier einen wesentlichen Anteil hat, kann keine Kennlinie benutzt werden.<br> | |||
===Analog-Digital-Umsetzer=== | |||
Wie werden die analogen Signale umgesetzt? <br> | |||
Wie oben erläutert, wird am Analogen Eingang des Arduino eine Spannung gemessen. Diese Spannung kann beim Arduino zwischen 0V und 5V liegen. Die Auflösung des Arduino lieg bei 10 Bit, dies bedeutet, dass der Arduino 1024 Werte unterscheiden kann. Die Spannungswerte werden in Integer Werte zwischen 0 und 1023 umgewandelt. Das Signl verfügt also über eine Auflösung von 0.005V pro Wert. Da das Auslesen eines Eingangs etwa 0.0001 Sekunden dauert können ca. 10.000 Messungen pro Sekunde aufgenommen werden. Daher bietet sich an als Baud Rate m Seriellen Monitor 9600 zu wählen. | |||
Welcher ADU kommt zum Einsatz?<br> | |||
Welche Gründe sprechen für diesen ADU? Alternativen?<br> | |||
Es wird die im Arduino Uni interne verbaute ADU genutzt. Vorteil dieser ADU ist, dass sie bereits integriert ist, sodass keine zusätzliche Hard und Software benötigt wird. Außerdem ist die zu erreichende Auflösung von 10 Bit absolut ausreichend, sodass nichts gegen die intern verbaute ADU spricht. Wenn eine höhere Genauigkeit oder zum Beispiel ein schnelleres Auslesen erforderlich ist, finden sich im Internet zahlreiche Bauteile, die an den Arduino angeschlossen werden können. | |||
===Bussystem=== | |||
Wird ein Bussystem zwischen Sensor und Mikrocontroller eingesetzt?<br> | |||
Für die Messung der Sensorwerte ist kein Bussystem notwendig und es wird auch keins verwendet. <br> | |||
===Digitale Signalverarbeitung=== | |||
Welche Verarbeitungsschritte sind notwendig?<br> | |||
Die Signale werden wie bereits oben beschrieben vom Analog Eingang ausgelesen und zur besseren Veranschaulichung in der Software in Spannungen zurück gerechnet. <br> | |||
Welche Filter werden angewendet?<br> | |||
Es werden keine Filter angewendet. Zur Ermittlung des digitalen Werts, also der Schwelle ab der die erfasste Lautstärke den Schwellwert erreicht, wird wie oben beschrieben ein Komparator benutzt.<br> | |||
Bestimmen Sie Auflösung, Empfindlichkeit und Messunsicherheit des Sensors.<br> | |||
laut Datenblatt hat der Sensor eine Empfindlichkeit von 46-+3 dB. Dies konnte ich mit dem Versuchsaufbau nicht überprüfen, da so nur Qualitative werte aufgenommen werden konnten. Die Auflösung ist, bedingt durch den Analog Digital Wandler des Arduino bei 10 Bit, was 1024 unterschiedlichen Schritten entspricht. | |||
==Hardwareaufbau== | |||
===Datenblatt=== | |||
Das Datenblatt des Sensors, also des eigentlichen Kondensatormikrofons ist hier [https://cdn-reichelt.de/documents/datenblatt/I210/EMY-9765P-46.pdf Datenblatt Kondensatormikrofon] verlinkt. <br> | |||
Das nur sehr dürftige und schlecht dokumentierte Datenblatt für das gesamte Modul ist hier[https://sensorkit.en.joy-it.net/index.php?title=KY-038_Microphone_sound_sensor_module Datenblatt KY 038 Modul] verlinkt. | |||
===Schaltung für die Inbetriebnahme=== | |||
Die Schaltung wurde mit dem Programm Fritzing erstellt, dazu wurde zusätzlich ein neues Bauteil angelegt, da der Sound Sensor nicht in dem Programm enthalten war. Das Anschlussbild und der Schaltplan ist in der folgenden Abbildung 6 zu sehen. | |||
<gallery class="center" caption="Abbildung 6: Sound Sensor Modul KY-038" widths="400" heights="400"> | |||
Datei:Anschlussbild_Sound_Sensor.png|'''Anschlussbild des Sound Sensors KY-038''' | |||
Datei:Anschlussplan_Sound_Sensor.png|'''Schaltplan des Sound Sensors KY-038''' | |||
</gallery> | |||
==Software== | |||
[[Datei:Pap_Auswertung_Sound_Sensor.png|500px|thumb|links|Abbildung 7: Programmablaufplan zur Auswertung der Messwerte <ref> Eigenes Dokument </ref>]] | |||
<br> | |||
Das Softwareprogramm ist nicht sehr umfangreich, ein Programmablaufplan ist in Abbildung 7 zu sehen. Nachdem die Messwerte zum einen vom Analog Ausgang eingelesen werden, findet eine Umrechnung der 1024 Schritte in den Bereich von 0 bis 5V statt. Zusätzlich wird in dem Programm noch der digitale Eingang abgefragt. Die beiden Messwerte werden dann im Seriellen Plotter der Arduino IDE ausgegeben. Das Ergebnis dieser Messung ist dann in nächsten Abschnitt zu sehen. | |||
<br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br> | |||
==Ergebnisse== | |||
[[Datei:Sound_Sensor_Messwerte.png|500px|thumb|links|Abbildung 8: Messwerte bei Pfeifen <ref> Eigenes Dokument </ref>]] | |||
[[Datei:Messwerte_Klopfen.png|525px|thumb|center| Abbildung 9: Messwerte bei Klopfen auf den Sensor <ref> Eigenes Dokument </ref>]]<br> | |||
In den Abbildungen 8 und 9 sieht man einen typischen Verlauf der Messwerte des analogen Ausgangs des Sensors. Der mittlere Grüne Linie sind in meinem Beispiel 2.5V. Ich habe 2.5V gewählt, da bei dieser Grundspannung gut Ausschläge zu erkennen sind und die Messwerte in ihrer Empfindlichkeit nicht zu groß sind aber auch nicht zu unempfindlich, sodass kaum eine Änderung der Schallwelle erkennbar ist. In der linken Abbildung sieht man die Reaktion des Analogen Ausgangs auf Pfeifen. Dabei treffen die Schallwellen des Pfeifens auf den Sensor und lassen die bewegliche Platte schwingen. Daher kommt es zu Ausschlägen nach oben und nach unten. Da sich der Plattenabstand mal vergrößert und mal verringert. Einen Unterschied hingegen sieht man, wenn man vorsichtig auf das Mikrofon klopft, wie in Abbildung 9 dargestellt. Dabei fällt auf, dass der Ausschlag nur nach unten stattfindet und anschließend wieder auf die Ausgangsspannung zurückgeht. Dis könnte damit erklärt werden, dass sich der Plattenabstand durch das Draufklopfen verringert, und somit eine niedrigere Spannung abgegriffen wird. Im Gegensatz zu den Schalwellen, die beim Pfeifen entstehen schwingt die Platte beim Klopfen nicht oder nur sehr schwach wieder zurück, sodass kaum Ausschläge in dem anderen Bereich zu erkennen sind. Dieses Verhalten der Spannung passt mit den Berechnungen und den Überlegungen zu der Schaltung zusammen, die im Abschnitt Meskette erläutert wurden. | |||
==Bewertung der Sensordaten== | ==Bewertung der Sensordaten== | ||
Welche Fehler treten in welchem Verarbeitungsschritt auf? | Welche Fehler treten in welchem Verarbeitungsschritt auf? <br> | ||
Stellen Sie die Messunsicherheit bzw. das Vertrauensintervall dar. | Stellen Sie die Messunsicherheit bzw. das Vertrauensintervall dar.<br> | ||
Es ist sehr schwierig, die Sensordaten tatsächlich zu bewerten. Es besteht nicht die Möglichkeit eine tatsächliche Messungenauigkeit zu bestimmen, da keine Vergleichswerte vorliegen und die Messungen so nur quantitativ als Qualitativ zu verstehen sind. Der Sensor liefert zwar stärker schwankende Spannungswerte bei höherer Lautstärke, jedoch kann dies nicht in eine Einheit wie z.B. Dezibel umgerechnet werden. Somit kann keine Messungenauigkeit und auch kein Vertrauensintervall für diesen Sensor bestimmt werden. | |||
Es lässt sich trotzdem festhalten, dass der Sensor insgesamt sehr ungenau ist. Ein Pfeifen wird zum Beispiel erst erkannt, wenn sich der Sensor in direkter Nähe zum Ton befindet, eine allgemein erhöhte Lautstärke in einem Raum erkennt das Mikrofon so also nicht. Die Einstellungen des Potentiometers ändern dieses Verhalten nicht. Eine Mögliche Verbesserung könnte sich einstellen, wenn man den ingebauten Komparator zusätzlich als Verstärker nutzen würde. Dafür wäre es möglich die Pins 1 und 2 zu mit einem Widerstand zu verbinden, um das Eingangssignal zu verstärken. Dies würde bewirken, dass auch geringere Ausschläge bereits angezeigt und ausgewertet werden können. Da es sich bei dem Bauteil um einen IC handelt, konnte ich dies aber leider nicht ausprobieren. | |||
== Zusammenfassung== | |||
Abschließend lässt sich festhalten, das diese Hausarbeit einen Sensor beziehungsweise ein Sensormodul betrachtet. Damit findet, wie in der Einleitung angesprochen eine praktische Vertiefung der Lehrinhalte der Vorlesung Sensortechnik statt. Der Sound Sensor, der hier betrachtet wurde, hat ein sogenanntes Elektret Kondensatormikrofon verbaut. Bei diesem ändert sich die Spannung durch Änderung der darauf treffenden Schallwellen. Mit Hilfe der Arduino IDE konnte diese Änderung ausgelesen und visualisiert werden. Zusätzlich wurde mit der Software Fritzing ein Schaltplan erstellt, und die notwendige Auswerteschaltung mit Hilfe eines Breadboard übersichtlich aufgebaut. So konnten die zuvor theoretisch durchdachten Messergebnisse durch den praktischen Aufbau bestätigt werden. Leider konnte aufgrund einer fehlenden Vergleichsmessung keine exakte Messungenauigkeit festgestellt oder berechnet werden. Insgesamt lässt sich trotzdem festhalten, dass der Sensor nur sehr schwach reagiert und somit ungenau ist. Dennoch war es eine gute und lehrreiche Aufgabe einen Sensor praktisch in Betrieb zu nehmen und einmal alle Schritte der Messwerterfassung und Auswertung zuerst theoretisch und dann praktisch durchzuführen. | |||
== Video== | |||
Hier sieht man ein Video, das ergänzend zu diesem Wiki Artikel die Ergebnisse zusammenfasst: [https://youtu.be/YC2OoOnn9h8 Sound Sensor Modul KY-038 HSHL Sensortechnik] | |||
== Literatur == | == Literatur == | ||
<references /> | |||
---- | ---- | ||
→ zurück zum Hauptartikel: [[ST WS2020|Sensortechnik WS 20/21] | → zurück zum Hauptartikel: [[ST WS2020|Sensortechnik WS 20/21]] | ||
Aktuelle Version vom 9. Januar 2021, 15:28 Uhr
Autor: Hendrik Steffen
Betreuer: Prof. Schneider
→ zurück zum Hauptartikel: Sensortechnik WS 20/21

Aufgabe
Vertiefend zu den Vorlesungen der Lehrveranstaltung Sensortechnik aus dem Schwerpunkt System Design Engineering besteht die Aufgabe einen beliebigen Sensor mithilfe eines Arduino Uno Boards in Betrieb zu nehmen. Zusätzlich wird in diesem Artikel der Weg vom Sensor, über den elektrischen Aufbau und die Programmierung bis hin zu brauchbaren Messergebnissen beschrieben.
In diesem Semester ersetzt diese Hausarbeit die Klausur für diese Lehrveranstaltung.
Einleitung
Die Lehrveranstaltung Sensortechnik gehört zum Studienschwerpunkt System Design Engineering im 5. Semester des Studienganges Mechatronik.
In diesem Artikel wird im Folgenden ein Sound Sensor Modul (KY-038 beschrieben). Auf dem oben dargestellten Foto ist das Sound Sensor Modul abgebildet. Auf diesem Modul ist der eigentliche Sensor montiert. Dies ist ein sogenanntes Kondensatormikrofon, das mit eintreffenden Schallwellen die Kapazität des Kondensators ändert. Auf dem Modul ist dann bereits eine Auswerteschaltung realisiert, die im Folgenden ebenfalls erläutert wird.
Technische Daten
Tabelle mit den technischen Daten des Kondensatormikrofons
| Typ | Wert |
|---|---|
| Empfindlichkeit | -46db +-3 |
| Richtwirkung | Omnidirektional |
| Stromverbrauch | max. 0.5 mA |
| Betriebsspannung | 1.5-10V |
| Betriebstemperatur | -10°C - 45°C |
| Lagertemperatur | -20°C- 60°C |
Beschreibung der Pins am Sound Sensor Modul
| PIN | Beschreibung |
|---|---|
| + | Versorgungsspannung (5V, 3.3V) |
| G | GND |
| A0 | Analog signal output Pin |
| D0 | Digital signal output Pin |
Prinziperklärung

Bei dem Sound Sensor Modul handelt es sich um ein Modul, dass im Wesentlichen aus 5 Komponenten besteht. Erstens das Kondensatormikrofon, dass die Schallwellen aufnimmt, zweitens ein Potentiometer, mit dem ein Schwellwert für die Empfindlichkeit eingestellt werden kann, drittens einem IC, der als Komparator fungiert, um die Schallwellen mit dem Schwellenwert zu vergleichen und zwei LEDS. Mit der einen LED wird angezeigt wird, ob eine Spannung anliegt und die zweite LED zeigt den digitalen Ausgang an, also ob der Schwellwert überschritten ist oder nicht. In der folgenden Abbildung 2 sind diese Bereiche auf dem Modul einmal dargestellt und beschriftet.
Auswahl eines Primärsensors
Wie funktioniert der Sensor?
Der eigentliche Sensor ist ein Kondensatormikrofon genauer gesagt handelt es sich um ein Elektret Mikrofon. Diesen Sensor kann man somit der Gruppe der kapazitiven EMS Sensoren zuordnen.
Das Mikrofon besteht aus zwei Platten, die einen Plattenkondensator bilden. Eine Platte davon ist fest fixiert, die andere Platte ist leicht beweglich. Wenn nun Schallwellen auf die bewegliche Platte treffen, verändert sich der Abstand der Platten zueinander. Anschließend schwingt die Platte wieder zurück, sodass sich eine leichte Schwingung einstellt, die dann gedämpft wid und sich langsam wieder legt. Wenn sich der Plattenabstand ändert, ändert sich auch die Kapazität des Kondensators, und somit ergibt sich auch eine Änderung der Spannung.
Die Spannung am Kondensator berechnet sich wie folgt. [3]
mit ergibt sich
- – Spannung am Kondensator in V
- – im Kondensator gespeicherte Ladung in As (für kurze Zeiträume als konstant angenommen)
- – Elektrische Kapazität der Kapsel in F
- – Abstand von Membran und Gegenelektrode
- – Elektrische Feldkonstante
- – relative Dielektrizitätskonstante
- – Feldwirksame Fläche zwischen Membran und Gegenelektrode
Eine Änderung des Plattenabstands hat somit eine proportionale Änderung von U in Folge.
Besonderheiten beim Aufbau eines Elektret Mikrofons:
Ein Elektret Mikrofon funktioniert wie oben beschrieben ebenfalls durch eine Änderung des Plattenabstandes a. Jedoch hat ein Elektret Mikrofon eine Elektret Membran. Ein Elektret hat elektrische Dipole, die eingefroren werden, somit erzeugen Elektrete ein ständiges elektrisches Feld, was mit dem magnetischen Feld eines Dauermagneten verglichen werden kann. Abbildung 3 zeigt den Aufbau eines Elektret Kondensatormikrofons.

Statt einer Membran aus Metall wird eine Membran aus einem Elektret verwendet, sodass auf eine Hilfsspannungsquelle verzichtet werden kann. Dies ist neben einer kompakten Bauweise und einem günstigen Preis ein weiterer Vorteil, sodass Elektret Mikrofone oft als Messmikrofone eingesetzt werden.
Welche Rohsignale liefert der Sensor?
Als Rohsignal liefert der Sensor somit eine Spannung zwischen 0 und 5V, da der Sensor an 5V angeschlossen ist. Allerdings wird die Größe dieser maximalen Spannungsänderung durch das Potentiometer begrenzt. Wenn dies auf einen hohen Widerstand eingestellt ist, ist die Messspanne von dem Kondensator natürlich kleiner, was somit einer geringeren Empfindlichkeit entspricht. Wenn der Widerstand des Potentiometers aber auf einem sehr kleinen Wert steht, fällt die Spannungsänderung am Kondensator höher ins Gewicht, sodass so die Empfindlichkeit des Sensors höher ist.
Equipment
Verwendete Software
- Arduino IDE
- Fritzing
Verwendete Komponenten
- Arduino Uno in der Elegoo Edition
- Breadboard
- Sound Sensor Modul KY-038
- Jumper Kabel
Messkette
Die Messkette sieht bei dem mir vorliegenden Sound Sensor Modul folgendermaßen aus. Auf dem Bild in Abbildung 4 sieht man die Schaltung und die Bauteile, die auf der Platine angebracht sind.

Es sind folgende Bauteile auf der Platine vorhanden:
- Q1: Kondensatormikrofon
- R2 und R6 Widerstände für den Spannungsteiler
- VR1: Potentiometer um die Empfindlichkeit des Mikrofons einzustellen
- U1.1 und U1.2 zusammen in einem IC (LM393), dient als Komparator, um den digitalen Ausgang zu schalten
- R1: Vorwiderstand für Spannungsteiler
- R4 und R5 Vorwiderstände für die LEDs
- L2: Led für den digitalen Ausgang
- L1: Led für die Spannungsversorgung
Der Komparator
Die beiden Operationsverstärker dienen als sogenannte Komparatoren. Ein Komparator vergleicht den nichtinvertierten Eingang und den invertierten Eingang miteinander. Je nachdem welcher Eingang das höhere Spannungspotential aufweist, wird der Ausgang des Komparators umgeschaltet. Sobald die Eingangsspannung am nichtinvertierten Eingang (+) höher ist als am invertierten Eingang (-) sperren die internen Transistoren den Ausgang. Wenn der Ausgang nun mit einem Vorwiderstand (in diesem Fall ist das R1) verbunden ist, kann ein HIGH Signal abgegriffen werden.
Der anderer Fall, wenn die Spannung an nichtinvertierten Eingang kleiner ist als am invertierten Eingang, leitet der Transistor am Ausgang und es kann ein LOW Impuls abgegriffen werden. [6]
Dieses Komparator Prinzip findet bei dem Sound Sensor Modul in dem IC LM 393 zweifach Anwendung.
Ablauf der Messung
Ganz links ist der eigentliche Sensor, das Kondensatormikrofon angebracht. Über einen Spannungsteiler ist dies zusammen mit R3 mit dem Potentiometer verbunden. An dem Potentiometer können dann im Extremfall nahezu 5V abfallen, was die Empfindlichkeit des Sensors auf 0 setzen und somit unbrauchbar machen würde, oder am Potentiometer würde nur sehr wendig Spannung abfallen und der gesamte Rest am Sensor, was diesen sehr empfindlich und machen würde. Hier ein gutes Mittelmaß zu finden, sodass z.B. 2.5V am Potentiometer abfallen und die restlichen 2.5V für die Änderung des Kondensators sind ergibt in diesem Fall am meisten Sinn, da so Schwingungen nach oben und nach unten ermöglicht werden. An diesem Spannungsteiler wird A0 abgegriffen, das wiederum vom Arduino eingelesen werden kann.
Der digitale Ausgang hingegen ist komplizierter aufgebaut. Die beiden Widerstände R6 und R3 bauen einen Spannungsteiler auf. Da die beiden Widerstände gleich groß sind, liegen an den beiden nichtinvertierten Eingängen des Komparators jeweils 2.5V an. Wird nun in das Mikrofon gesprochen, liegt am invertierten Eingang von U1.1 ein kleineres Signal an als die 2.5V die am nichtinvertierten Eingang anliegen. Somit kann ein HIGH Signal am Ausgang abgegriffen werden. Dieses Signal wird dann auch am D0 Ausgang abgegriffen. Dieses HIGH Signal liegt dann am 2. Komparator an. Da dann das Signal am invertierten Eingang größer ist als am nichtinvertierten, kommt am Ausgang ein LOW Signal heraus. Dies wird benötigt, damit die angeschlossenen LED eine Potentialdifferenz von 5V hat um zu leuchten.
Im anderen Fall also bei Stille, sind die 2.5V am nichtinvertierten Eingang des 1. Komparators kleiner als die Spannung am invertierten Eingang, sodass der digitale Ausgang nicht geschaltet wird, und auch die LED2 nicht leuchtet.
Der Ablauf der Messung ist in dem folgenden Flussdiagramm in Abbildung 5 noch einmal kurz zusammengefasst:

Signalvorverarbeitung
Sollen Messwerte oder vorverarbeitete Daten übertragen werden?
Wie anhand der oben abgebildeten Schaltung erläutert, werden für den Analogen Ausgang die direkten Messwerte aus dem Spannungsteiler abgegriffen, es findet also beim Analogen Ausgang keine Vorverarbeitung statt.
Die Vorverarbeitung jedoch, ist bei dem digitalen Ausgang notwendig. Wie bereits im letzten Abschnitt erläutert, wird mithilfe eines Komparators der Eingang des Mikrofons verglichen und je nach Stärke des Signals der digitale Ausgang auf 0 oder 1 gesetzt.
Wie lässt sich eine Vorverarbeitung umsetzen?
Die Daten bzw. die ankommende Spannung wird mithilfe des Komparators verglichen. Dies ist eine sehr einfache Methode, die aber seinen Zweck erfüllt, aus der Spannungsänderung ein digitales Signal zu generieren, dass dann nur noch zwischen HIGH und LOW unterscheidet.
Wird eine Kennlinie eingesetzt? Wenn ja, wie wird diese kalibriert?
Bei dem Sound Sensor Modul wird keine Kennlinie eingesetzt, da die vom Analog Ausgang abgegriffene Spannungsänderung des Kondensators nur mittelbar mit dem Signal des Kondensators zusammenhängt. Da das Potentiometer hier einen wesentlichen Anteil hat, kann keine Kennlinie benutzt werden.
Analog-Digital-Umsetzer
Wie werden die analogen Signale umgesetzt?
Wie oben erläutert, wird am Analogen Eingang des Arduino eine Spannung gemessen. Diese Spannung kann beim Arduino zwischen 0V und 5V liegen. Die Auflösung des Arduino lieg bei 10 Bit, dies bedeutet, dass der Arduino 1024 Werte unterscheiden kann. Die Spannungswerte werden in Integer Werte zwischen 0 und 1023 umgewandelt. Das Signl verfügt also über eine Auflösung von 0.005V pro Wert. Da das Auslesen eines Eingangs etwa 0.0001 Sekunden dauert können ca. 10.000 Messungen pro Sekunde aufgenommen werden. Daher bietet sich an als Baud Rate m Seriellen Monitor 9600 zu wählen.
Welcher ADU kommt zum Einsatz?
Welche Gründe sprechen für diesen ADU? Alternativen?
Es wird die im Arduino Uni interne verbaute ADU genutzt. Vorteil dieser ADU ist, dass sie bereits integriert ist, sodass keine zusätzliche Hard und Software benötigt wird. Außerdem ist die zu erreichende Auflösung von 10 Bit absolut ausreichend, sodass nichts gegen die intern verbaute ADU spricht. Wenn eine höhere Genauigkeit oder zum Beispiel ein schnelleres Auslesen erforderlich ist, finden sich im Internet zahlreiche Bauteile, die an den Arduino angeschlossen werden können.
Bussystem
Wird ein Bussystem zwischen Sensor und Mikrocontroller eingesetzt?
Für die Messung der Sensorwerte ist kein Bussystem notwendig und es wird auch keins verwendet.
Digitale Signalverarbeitung
Welche Verarbeitungsschritte sind notwendig?
Die Signale werden wie bereits oben beschrieben vom Analog Eingang ausgelesen und zur besseren Veranschaulichung in der Software in Spannungen zurück gerechnet.
Welche Filter werden angewendet?
Es werden keine Filter angewendet. Zur Ermittlung des digitalen Werts, also der Schwelle ab der die erfasste Lautstärke den Schwellwert erreicht, wird wie oben beschrieben ein Komparator benutzt.
Bestimmen Sie Auflösung, Empfindlichkeit und Messunsicherheit des Sensors.
laut Datenblatt hat der Sensor eine Empfindlichkeit von 46-+3 dB. Dies konnte ich mit dem Versuchsaufbau nicht überprüfen, da so nur Qualitative werte aufgenommen werden konnten. Die Auflösung ist, bedingt durch den Analog Digital Wandler des Arduino bei 10 Bit, was 1024 unterschiedlichen Schritten entspricht.
Hardwareaufbau
Datenblatt
Das Datenblatt des Sensors, also des eigentlichen Kondensatormikrofons ist hier Datenblatt Kondensatormikrofon verlinkt.
Das nur sehr dürftige und schlecht dokumentierte Datenblatt für das gesamte Modul ist hierDatenblatt KY 038 Modul verlinkt.
Schaltung für die Inbetriebnahme
Die Schaltung wurde mit dem Programm Fritzing erstellt, dazu wurde zusätzlich ein neues Bauteil angelegt, da der Sound Sensor nicht in dem Programm enthalten war. Das Anschlussbild und der Schaltplan ist in der folgenden Abbildung 6 zu sehen.
- Abbildung 6: Sound Sensor Modul KY-038
-
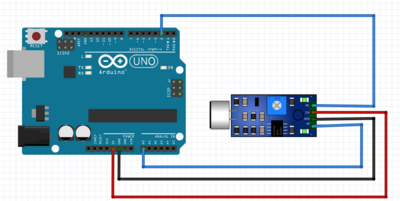 Anschlussbild des Sound Sensors KY-038
Anschlussbild des Sound Sensors KY-038 -
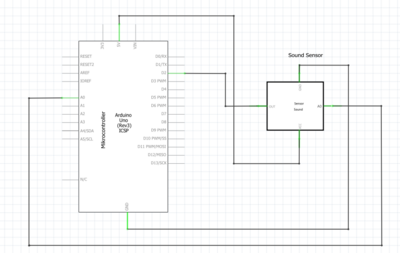 Schaltplan des Sound Sensors KY-038
Schaltplan des Sound Sensors KY-038


Software

Das Softwareprogramm ist nicht sehr umfangreich, ein Programmablaufplan ist in Abbildung 7 zu sehen. Nachdem die Messwerte zum einen vom Analog Ausgang eingelesen werden, findet eine Umrechnung der 1024 Schritte in den Bereich von 0 bis 5V statt. Zusätzlich wird in dem Programm noch der digitale Eingang abgefragt. Die beiden Messwerte werden dann im Seriellen Plotter der Arduino IDE ausgegeben. Das Ergebnis dieser Messung ist dann in nächsten Abschnitt zu sehen.
Ergebnisse


In den Abbildungen 8 und 9 sieht man einen typischen Verlauf der Messwerte des analogen Ausgangs des Sensors. Der mittlere Grüne Linie sind in meinem Beispiel 2.5V. Ich habe 2.5V gewählt, da bei dieser Grundspannung gut Ausschläge zu erkennen sind und die Messwerte in ihrer Empfindlichkeit nicht zu groß sind aber auch nicht zu unempfindlich, sodass kaum eine Änderung der Schallwelle erkennbar ist. In der linken Abbildung sieht man die Reaktion des Analogen Ausgangs auf Pfeifen. Dabei treffen die Schallwellen des Pfeifens auf den Sensor und lassen die bewegliche Platte schwingen. Daher kommt es zu Ausschlägen nach oben und nach unten. Da sich der Plattenabstand mal vergrößert und mal verringert. Einen Unterschied hingegen sieht man, wenn man vorsichtig auf das Mikrofon klopft, wie in Abbildung 9 dargestellt. Dabei fällt auf, dass der Ausschlag nur nach unten stattfindet und anschließend wieder auf die Ausgangsspannung zurückgeht. Dis könnte damit erklärt werden, dass sich der Plattenabstand durch das Draufklopfen verringert, und somit eine niedrigere Spannung abgegriffen wird. Im Gegensatz zu den Schalwellen, die beim Pfeifen entstehen schwingt die Platte beim Klopfen nicht oder nur sehr schwach wieder zurück, sodass kaum Ausschläge in dem anderen Bereich zu erkennen sind. Dieses Verhalten der Spannung passt mit den Berechnungen und den Überlegungen zu der Schaltung zusammen, die im Abschnitt Meskette erläutert wurden.
Bewertung der Sensordaten
Welche Fehler treten in welchem Verarbeitungsschritt auf?
Stellen Sie die Messunsicherheit bzw. das Vertrauensintervall dar.
Es ist sehr schwierig, die Sensordaten tatsächlich zu bewerten. Es besteht nicht die Möglichkeit eine tatsächliche Messungenauigkeit zu bestimmen, da keine Vergleichswerte vorliegen und die Messungen so nur quantitativ als Qualitativ zu verstehen sind. Der Sensor liefert zwar stärker schwankende Spannungswerte bei höherer Lautstärke, jedoch kann dies nicht in eine Einheit wie z.B. Dezibel umgerechnet werden. Somit kann keine Messungenauigkeit und auch kein Vertrauensintervall für diesen Sensor bestimmt werden.
Es lässt sich trotzdem festhalten, dass der Sensor insgesamt sehr ungenau ist. Ein Pfeifen wird zum Beispiel erst erkannt, wenn sich der Sensor in direkter Nähe zum Ton befindet, eine allgemein erhöhte Lautstärke in einem Raum erkennt das Mikrofon so also nicht. Die Einstellungen des Potentiometers ändern dieses Verhalten nicht. Eine Mögliche Verbesserung könnte sich einstellen, wenn man den ingebauten Komparator zusätzlich als Verstärker nutzen würde. Dafür wäre es möglich die Pins 1 und 2 zu mit einem Widerstand zu verbinden, um das Eingangssignal zu verstärken. Dies würde bewirken, dass auch geringere Ausschläge bereits angezeigt und ausgewertet werden können. Da es sich bei dem Bauteil um einen IC handelt, konnte ich dies aber leider nicht ausprobieren.
Zusammenfassung
Abschließend lässt sich festhalten, das diese Hausarbeit einen Sensor beziehungsweise ein Sensormodul betrachtet. Damit findet, wie in der Einleitung angesprochen eine praktische Vertiefung der Lehrinhalte der Vorlesung Sensortechnik statt. Der Sound Sensor, der hier betrachtet wurde, hat ein sogenanntes Elektret Kondensatormikrofon verbaut. Bei diesem ändert sich die Spannung durch Änderung der darauf treffenden Schallwellen. Mit Hilfe der Arduino IDE konnte diese Änderung ausgelesen und visualisiert werden. Zusätzlich wurde mit der Software Fritzing ein Schaltplan erstellt, und die notwendige Auswerteschaltung mit Hilfe eines Breadboard übersichtlich aufgebaut. So konnten die zuvor theoretisch durchdachten Messergebnisse durch den praktischen Aufbau bestätigt werden. Leider konnte aufgrund einer fehlenden Vergleichsmessung keine exakte Messungenauigkeit festgestellt oder berechnet werden. Insgesamt lässt sich trotzdem festhalten, dass der Sensor nur sehr schwach reagiert und somit ungenau ist. Dennoch war es eine gute und lehrreiche Aufgabe einen Sensor praktisch in Betrieb zu nehmen und einmal alle Schritte der Messwerterfassung und Auswertung zuerst theoretisch und dann praktisch durchzuführen.
Video
Hier sieht man ein Video, das ergänzend zu diesem Wiki Artikel die Ergebnisse zusammenfasst: Sound Sensor Modul KY-038 HSHL Sensortechnik
Literatur
- ↑ https://www.az-delivery.de/products/mikrofon-modul-klein
- ↑ Eigene Zeichnung
- ↑ Hesse, S. Schnell, G..: Sensoren für die Prozess und Fabrikautomation Vieweg & Teubner, 5. Auflage 2012. ISBN: 978-3-8348-0895-0
- ↑ Bernstein, H.: Elektroakustik: Mikrofone, Klangstufen, Verstärker, Filterschaltungen und Lautsprecher Springer, 2. Auflage 2019
- ↑ https://easyeda.com/adrirobot/KY_038_Microphone_sound_sensor_module-283a631354c24d129bca349e77da0d18
- ↑ https://www.conrad.de/de/ratgeber/handwerk-industrie-wiki/elektronik-bauteile/lm393.html, Aufruf am 02.01.2021
- ↑ Eigenes Dokument
- ↑ Eigenes Dokument
- ↑ Eigenes Dokument
- ↑ Eigenes Dokument
→ zurück zum Hauptartikel: Sensortechnik WS 20/21