LRP Motorsteuerung: Unterschied zwischen den Versionen
| (64 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
'''Autoren: Benjamin Dilly & Kevin Mudczinski''' <br/> | |||
'''Letzte Änderung: 02.12.2023''' <br/> | |||
<gallery widths="700" heights="400"> | |||
Datei:LRP_FLOW_WORKSTEAM_BL_Regler.jpg|600px|Abbildung 0: LRP WORKS TEAM Regler https://www.lrp.cc/fileadmin/_processed_/csm_80970_00_295c11e329.jpg | |||
</gallery> | |||
Alle Daten zur Firmware und Installationsanleitungen sind im SVN unter <code>Software/LRP_Regler/</code> abgelegt. | |||
== Firmware updaten == | |||
Die Dokumentation wurde anhand des CaroloCupFahrzeugs 1 erstellt. Aus diesem Grund können sich die Einrichtungsschritte und die Position und Beschaffenheit der Steckverbundungen von Fahrzeug zu Fahrzeug minimal abweichen. | |||
=== Vorbereitung Fahrzeug === | === Vorbereitung Fahrzeug === | ||
Zunächst muss das Steuergerät vom Strom getrennt werden. Hierfür muss der Fahrzeugakku entfernt und die folgenden Kabel gezogen werden: | Zunächst muss das Steuergerät vom Strom getrennt werden. Hierfür muss der Fahrzeugakku entfernt und die folgenden Kabel gezogen werden: | ||
* | * Stecker J6, J7 und J8 lösen (Siehe Abbildung 1) | ||
* Stecker FahrAkku lösen (Siehe Abbildung 2) | |||
<gallery widths=" | <br> | ||
Datei:CaroloCup_Fahrzeug_Stecker_Empfaenger_Steuergeraet_Hall.jpg|600px| | Zudem muss der Antriebsschalter auf <code>AUS</code>/<code>Nach Links</code> gestellt werden. (Siehe Abbildung 3) | ||
<gallery widths="400" heights="400"> | |||
Datei:CaroloCup_Fahrzeug_Stecker_Empfaenger_Steuergeraet_Hall.jpg|600px|Abbildung 1: Darstellung der 3 Stecker J6, J7 und J8, die auf der Platine herausgezogen werden müssen | |||
Datei:CaroloCup_Fahrzeug_Stecker_Stromversorgung_Aktoren.jpg|600px|Abbildung 2: Darstellung der des FahrAkku-Steckers, der gezogen werden muss | |||
Datei:CaroloCup_Fahrzeug_Aktoren_Notaus.jpg|600px|Abbildung 3: Darstellung des Sicherungsschalters für den Fahrantrieb | |||
Datei: | |||
</gallery> | </gallery> | ||
=== USB-Bridge V3 anschließen === | |||
Um die Firmware zu flashen, muss die LRP-Bridge (USB Bridge V3) aus der Box entnommen werden. (Siehe Abbildung 4) | |||
Dieser muss über den USB-A Stecker mit dem PC des CaroloCup-Fahrzeugs verbunden werden. | |||
Anschließend muss der Mehrfachstecker mit dem LRP-Steuergerät verbunden werden. Dabei muss die Richtung des Steckers beachtet werden. (Siehe Abbildung 5) | |||
<gallery widths="400" heights="400"> | |||
Datei:LRP_Firmware_Programmer.jpg|600px|Abbildung 4: Darstellung der USB Bridge V3 für das Updaten der Firmware | |||
<gallery widths=" | Datei:CaroloCup_Fahrzeug_LRP_Firmware_Kabel.jpg|600px|Abbildung 5: Darstellung des Sicherungsschalters für den Fahrantrieb | ||
Datei:LRP_Firmware_Programmer.jpg|600px| | |||
Datei:CaroloCup_Fahrzeug_LRP_Firmware_Kabel.jpg|600px| | |||
</gallery> | </gallery> | ||
=== Firmware Update | === Firmware-Update hochladen === | ||
Zum Hochladen der Firmware muss der LRP-Updater auf dem Fahrzeug-PC gestartet werden. | Zum Hochladen der Firmware muss der LRP-Updater auf dem Fahrzeug-PC gestartet werden. (Siehe Abbildung 6) <br> | ||
'''Drücken Sie auf Verbinden'''. Ist Verbindung erfolgreich werden die | '''Drücken Sie auf Verbinden'''. Ist die Verbindung erfolgreich, werden die Steuergeräteinformationen angezeigt. Bei einem Fehler sollte die Verbindung der LRP-Bridge mit dem LRP-Motorsteuergerät überprüft werden.<br> | ||
'''Drücken Sie auf Öffnen'''. Nachdem das Gerät erfolgreich verbunden wurde, muss nun die richtige Firmwaredatei ausgewählt werden. Diese liegt unter dem Ordner | '''Drücken Sie auf Öffnen'''. Nachdem das Gerät erfolgreich verbunden wurde, muss nun die richtige Firmwaredatei ausgewählt werden. Diese liegt unter dem Ordner <code>Software/LRP_Regler/Flow_v15_special_reverse_firmware/</code> im Software-Ordner des CaroloCupFahrzeugs. Es muss die Datei <code>Flow_v15.lrp2</code> gewählt werden.<br> | ||
Nachdem die | Nachdem die Firmwaredatei erfolgreich geladen wurde, muss '''START''' ausgeführt werden. Das Flashen der Firmware kann einige Zeit in Anspruch nehmen (ca. 5 Minuten). | ||
<gallery widths=" | <gallery widths="400" heights="400"> | ||
Datei: | Datei:LRP Firmware Update Software 2.jpg|600px|Abbildung 6: Darstellung der LRP-Updater Software | ||
</gallery> | </gallery> | ||
== Steuergerät einrichten == | == Steuergerät einrichten == | ||
Die Anleitung zum Einrichten des | Die Anleitung zum Einrichten des Steuergerätes finden Sie unter dem Ordner <code>Software/LRP_Regler/Flow_v15_special_reverse_firmware/</code>. <br> | ||
Dafür muss das Servoempfängerkabel über einen Adapter mit dem Reglerkabel gebrückt werden. (Siehe Abbildung 7) <br> | |||
<gallery widths=" | <gallery widths="400" heights="400"> | ||
Datei:Überbrückung Empfänger und Regler.jpg|600px| | Datei:Überbrückung Empfänger und Regler.jpg|600px|Abbildung 7: Darstellung des Adapterkabels, welches das Servoempfängerkabel auf das Reglerkabel brückt | ||
</gallery> | </gallery> | ||
<br> | |||
Die Modes | Die Modes müssen wie folgt anhand der Anleitung eingestellt werden: | ||
* Auto Break: Einstellung 0 | * Auto Break: Einstellung 0 | ||
* Initial Drive: Einstellung 0 | * Initial Drive: Einstellung 0 | ||
| Zeile 72: | Zeile 63: | ||
==== Matlab Parameter | ==== Matlab Parameter anpassen ==== | ||
Damit das Vorwärts- und Rückwärtsfahren auch von ControlDesk gesteuert werden kann, müssen noch Parameter bzw. Look-Up-Tables angepasst werden. Die Parameter und Lookup-Tables sind in drei verschiedenen Dateien hinterlegt. | Damit das Vorwärts- und Rückwärtsfahren auch von ControlDesk gesteuert werden kann, müssen noch Parameter bzw. Look-Up-Tables angepasst werden. Die Parameter und Lookup-Tables sind in drei verschiedenen Dateien hinterlegt. Die Bedeutung der Parameter und Look-Up-Tables wird im Folgenden anhand der Abbildungen 8 und 9 erläutert. | ||
===== Fernbedienungseingriff ===== | ===== Fernbedienungseingriff ===== | ||
Im Folgenden werden die relevanten Parameter für den Fernbedienungseingriff erläutert. In Abbildung 1 sind die Parameter für den Eingang, die Verarbeitung und den Ausgang dargestellt. Unter jedem Abschnitt ist der Dateiname angegeben, in dem die Parameter definiert sind. Die Pfeile stellen quantitativ den Wertebereich dar, um den Zusammenhang der Parameter untereinander besser zu verstehen. | Im Folgenden werden die relevanten Parameter für den Fernbedienungseingriff erläutert. In Abbildung 1 sind die Parameter für den Eingang, die Verarbeitung und den Ausgang dargestellt. Unter jedem Abschnitt ist der Dateiname angegeben, in dem die Parameter definiert sind. Die Pfeile stellen quantitativ den Wertebereich dar, um den Zusammenhang der Parameter untereinander besser zu verstehen. | ||
Die drei Parameter im blau hinterlegten Eingang beschreiben den Maximalem PWM Wert (Fernbedienung maximal rückwärts), den Minimalen PWM Wert (Fernbedienung maximal vorwärts) und den PWM Wert, wenn der Gashebel der Fernbedienung in der Mitte steht. Diese Parameter konnten mit dem Plot im ControlDesk Layout "Fernbedienung" abgelesen werden. | Die drei Parameter im blau hinterlegten Eingang beschreiben den Maximalem PWM Wert <code>PAR_LookUpPWMSignalGas_f64(1)</code> (Fernbedienung maximal rückwärts), den Minimalen PWM Wert <code>PAR_LookUpPWMSignalGas_f64(2)</code> (Fernbedienung maximal vorwärts) und den PWM Wert <code>PAR_LookUpPWMSignalGas_f64(3)</code>, wenn der Gashebel der Fernbedienung in der Mitte steht. Diese Parameter konnten mit dem Plot im ControlDesk Layout "Fernbedienung" abgelesen werden. | ||
Im violett hinterlegten Bereich Verarbeitung wird einerseits der PWM-Bereich der Fernbedienung angegeben, indem der | Im violett hinterlegten Bereich Verarbeitung wird einerseits der PWM-Bereich der Fernbedienung mit <code>PAR_SenFernb_Gas_UpperBound_f64</code> <code>PAR_SenFernb_Gas_LowerBound_f64</code> angegeben, indem kein Eingriff erkannt werden soll, andererseits wird die Geschwindigkeit in Vorwärts- und Rückwärtsrichtung mit <code>PAR_SenFernb_MaxGasPWMBreite_f64</code> und <code>PAR_SenFernb_MinGasPWMBreite_f64</code> begrenzt, um dem Nutzer nicht die gesamte Leistung des Fahrzeugs zur Verfügung zu stellen. Die Eingriffsgrenzen für die Fernbedienung müssen so groß gewählt werden, dass zufälliges Rauschen des PWM-Signals der Fernbedienung keinen Eingriff auslöst, aber so klein, dass das Fahrzeug unmittelbar einen Eingriff erkennt, wenn der Gashebel betätigt wird. Die Geschwindigkeitsbegrenzungen müssen so gewählt werden, dass nur eine langsame Fortbewegung zugelassen wird. Aus diesen Grenzen ergeben sich am Ausgang zwei Bereiche, in denen ein Eingriff für vorwärts und rückwärts erkannt und umgesetzt wird. | ||
<gallery widths="700" heights="400"> | |||
Datei:Parameter_Gas_Fernbedienung.png|600px|Abbildung 8: Schematische Darstellung der relevanten Parameter für die Ansteuerung des Antriebs mit der Fernbedienung | |||
</gallery> | |||
===== Längsregelung ===== | ===== Längsregelung ===== | ||
Im Folgenden werden die relevanten Parameter für | Im Folgenden werden die relevanten Parameter für den Fernbedienungseingriff erläutert. In Abbildung 1 sind die Parameter für den Eingang, die Verarbeitung und den Ausgang dargestellt. Unter jedem Abschnitt ist der Dateiname angegeben, in dem die Parameter definiert sind. Die Pfeile stellen quantitativ den Wertebereich dar, um den Zusammenhang der Parameter untereinander besser zu verstehen. | ||
Diese sind | Die drei Parameter im blau hinterlegten Eingang beschreiben den Maximalem PWM Wert <code>PAR_LookUpPWMSignalGas_f64(1)</code> (Fernbedienung maximal rückwärts), den Minimalen PWM Wert <code>PAR_LookUpPWMSignalGas_f64(2)</code> (Fernbedienung maximal vorwärts) und den PWM Wert <code>PAR_LookUpPWMSignalGas_f64(3)</code>, wenn der Gashebel der Fernbedienung in der Mitte steht. Diese Parameter konnten mit dem Plot im ControlDesk Layout "Fernbedienung" abgelesen werden. | ||
Im violett hinterlegten Bereich Verarbeitung werden die beiden Parameter <code>PAR_BSFLaengs_FahrpedalSoll_Min_f64</code> und <code>PAR_BSFLaengs_FahrpedalSoll_Max_f64</code> dargestellt. Diese sind Prozentwerte und begrenzen die maximal nutzbare PWM-Breite für das Ansteuern des Antriebs, sodass der Regler nicht die gesamte Leistung nutzen kann. | |||
<gallery widths="700" heights="400"> | |||
Datei:Parameter_Gas_Laengsregelung.png|600px|Abbildung 9: Schematische Darstellung der relevanten Parameter für die Ansteuerung des Antriebs mit der Längsregelung | |||
</gallery> | |||
===== Parameter im Simulink Model ===== | |||
In den Abbildungen 10 und 11 wird dargestellt, welche Parameter wo im Simulink Model genutzt werden. | |||
<gallery widths="700" heights="400"> | |||
Datei:Abbildung AktRtiPwm PWM4fach Modul der RTI Bloecke Gas Parameter.png|600px|Abbildung 10: Darstellung des Simulink Blocks: AktRtiPwm - PWM4fach-Modul der RTI-Bloecke und die hier erläuterten Parameter | |||
</gallery> | |||
<gallery widths="700" heights="400"> | |||
Datei:Abbildung SenFernb - Fernbedienung Parameter.png|600px|Abbildung 11: Darstellung des Simulink Blocks: SenFernb - Fernbedienung und die hier erläuterten Parameter | |||
</gallery> | |||
== Weblinks == | |||
[https://www.lrp.cc/de/produkt/flow-worksteam-bl-regler/ LRP FLOW WORKSTEAM BL REGLER] <br> | |||
[https://www.lrp.cc/de/service/software-updates/firmwarefilter/80970/ Flow WorksTeam BL Regler Software] <br> | |||
[https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Software/LRP_Regler/Flow_v15_special_reverse_firmware/ SVN-Ordner der Reverse-Firmware] <br> | |||
[https://www.lrp.cc/de/service/software-updates/ LRP Firmware Update Tool 2.2.0 - Windows] <br> | |||
== Literatur == | |||
Software, Anleitungen und Firmware sind Abgelegt unter <br> | |||
<code>https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Software/LRP_Regler/</code> | |||
[ | |||
[ | |||
Aktuelle Version vom 3. Dezember 2023, 20:05 Uhr
Autoren: Benjamin Dilly & Kevin Mudczinski
Letzte Änderung: 02.12.2023
-
 Abbildung 0: LRP WORKS TEAM Regler https://www.lrp.cc/fileadmin/_processed_/csm_80970_00_295c11e329.jpg
Abbildung 0: LRP WORKS TEAM Regler https://www.lrp.cc/fileadmin/_processed_/csm_80970_00_295c11e329.jpg

Alle Daten zur Firmware und Installationsanleitungen sind im SVN unter Software/LRP_Regler/ abgelegt.
Firmware updaten
Die Dokumentation wurde anhand des CaroloCupFahrzeugs 1 erstellt. Aus diesem Grund können sich die Einrichtungsschritte und die Position und Beschaffenheit der Steckverbundungen von Fahrzeug zu Fahrzeug minimal abweichen.
Vorbereitung Fahrzeug
Zunächst muss das Steuergerät vom Strom getrennt werden. Hierfür muss der Fahrzeugakku entfernt und die folgenden Kabel gezogen werden:
- Stecker J6, J7 und J8 lösen (Siehe Abbildung 1)
- Stecker FahrAkku lösen (Siehe Abbildung 2)
Zudem muss der Antriebsschalter auf AUS/Nach Links gestellt werden. (Siehe Abbildung 3)
-
 Abbildung 1: Darstellung der 3 Stecker J6, J7 und J8, die auf der Platine herausgezogen werden müssen
Abbildung 1: Darstellung der 3 Stecker J6, J7 und J8, die auf der Platine herausgezogen werden müssen -
 Abbildung 2: Darstellung der des FahrAkku-Steckers, der gezogen werden muss
Abbildung 2: Darstellung der des FahrAkku-Steckers, der gezogen werden muss -
 Abbildung 3: Darstellung des Sicherungsschalters für den Fahrantrieb
Abbildung 3: Darstellung des Sicherungsschalters für den Fahrantrieb



USB-Bridge V3 anschließen
Um die Firmware zu flashen, muss die LRP-Bridge (USB Bridge V3) aus der Box entnommen werden. (Siehe Abbildung 4) Dieser muss über den USB-A Stecker mit dem PC des CaroloCup-Fahrzeugs verbunden werden. Anschließend muss der Mehrfachstecker mit dem LRP-Steuergerät verbunden werden. Dabei muss die Richtung des Steckers beachtet werden. (Siehe Abbildung 5)
-
 Abbildung 4: Darstellung der USB Bridge V3 für das Updaten der Firmware
Abbildung 4: Darstellung der USB Bridge V3 für das Updaten der Firmware -
 Abbildung 5: Darstellung des Sicherungsschalters für den Fahrantrieb
Abbildung 5: Darstellung des Sicherungsschalters für den Fahrantrieb


Firmware-Update hochladen
Zum Hochladen der Firmware muss der LRP-Updater auf dem Fahrzeug-PC gestartet werden. (Siehe Abbildung 6)
Drücken Sie auf Verbinden. Ist die Verbindung erfolgreich, werden die Steuergeräteinformationen angezeigt. Bei einem Fehler sollte die Verbindung der LRP-Bridge mit dem LRP-Motorsteuergerät überprüft werden.
Drücken Sie auf Öffnen. Nachdem das Gerät erfolgreich verbunden wurde, muss nun die richtige Firmwaredatei ausgewählt werden. Diese liegt unter dem Ordner Software/LRP_Regler/Flow_v15_special_reverse_firmware/ im Software-Ordner des CaroloCupFahrzeugs. Es muss die Datei Flow_v15.lrp2 gewählt werden.
Nachdem die Firmwaredatei erfolgreich geladen wurde, muss START ausgeführt werden. Das Flashen der Firmware kann einige Zeit in Anspruch nehmen (ca. 5 Minuten).
-
 Abbildung 6: Darstellung der LRP-Updater Software
Abbildung 6: Darstellung der LRP-Updater Software

Steuergerät einrichten
Die Anleitung zum Einrichten des Steuergerätes finden Sie unter dem Ordner Software/LRP_Regler/Flow_v15_special_reverse_firmware/.
Dafür muss das Servoempfängerkabel über einen Adapter mit dem Reglerkabel gebrückt werden. (Siehe Abbildung 7)
-
 Abbildung 7: Darstellung des Adapterkabels, welches das Servoempfängerkabel auf das Reglerkabel brückt
Abbildung 7: Darstellung des Adapterkabels, welches das Servoempfängerkabel auf das Reglerkabel brückt

Die Modes müssen wie folgt anhand der Anleitung eingestellt werden:
- Auto Break: Einstellung 0
- Initial Drive: Einstellung 0
- Reverse: Einstellung 1
- Torque Timing: Einstellung 0
- Boost Timing: Einstellung 0
- Boost Ramp: Einstellung 3
- Boost Turbo: Einstellung 0
- Protection: Einstellung 0
Matlab Parameter anpassen
Damit das Vorwärts- und Rückwärtsfahren auch von ControlDesk gesteuert werden kann, müssen noch Parameter bzw. Look-Up-Tables angepasst werden. Die Parameter und Lookup-Tables sind in drei verschiedenen Dateien hinterlegt. Die Bedeutung der Parameter und Look-Up-Tables wird im Folgenden anhand der Abbildungen 8 und 9 erläutert.
Fernbedienungseingriff
Im Folgenden werden die relevanten Parameter für den Fernbedienungseingriff erläutert. In Abbildung 1 sind die Parameter für den Eingang, die Verarbeitung und den Ausgang dargestellt. Unter jedem Abschnitt ist der Dateiname angegeben, in dem die Parameter definiert sind. Die Pfeile stellen quantitativ den Wertebereich dar, um den Zusammenhang der Parameter untereinander besser zu verstehen.
Die drei Parameter im blau hinterlegten Eingang beschreiben den Maximalem PWM Wert PAR_LookUpPWMSignalGas_f64(1) (Fernbedienung maximal rückwärts), den Minimalen PWM Wert PAR_LookUpPWMSignalGas_f64(2) (Fernbedienung maximal vorwärts) und den PWM Wert PAR_LookUpPWMSignalGas_f64(3), wenn der Gashebel der Fernbedienung in der Mitte steht. Diese Parameter konnten mit dem Plot im ControlDesk Layout "Fernbedienung" abgelesen werden.
Im violett hinterlegten Bereich Verarbeitung wird einerseits der PWM-Bereich der Fernbedienung mit PAR_SenFernb_Gas_UpperBound_f64 PAR_SenFernb_Gas_LowerBound_f64 angegeben, indem kein Eingriff erkannt werden soll, andererseits wird die Geschwindigkeit in Vorwärts- und Rückwärtsrichtung mit PAR_SenFernb_MaxGasPWMBreite_f64 und PAR_SenFernb_MinGasPWMBreite_f64 begrenzt, um dem Nutzer nicht die gesamte Leistung des Fahrzeugs zur Verfügung zu stellen. Die Eingriffsgrenzen für die Fernbedienung müssen so groß gewählt werden, dass zufälliges Rauschen des PWM-Signals der Fernbedienung keinen Eingriff auslöst, aber so klein, dass das Fahrzeug unmittelbar einen Eingriff erkennt, wenn der Gashebel betätigt wird. Die Geschwindigkeitsbegrenzungen müssen so gewählt werden, dass nur eine langsame Fortbewegung zugelassen wird. Aus diesen Grenzen ergeben sich am Ausgang zwei Bereiche, in denen ein Eingriff für vorwärts und rückwärts erkannt und umgesetzt wird.
-
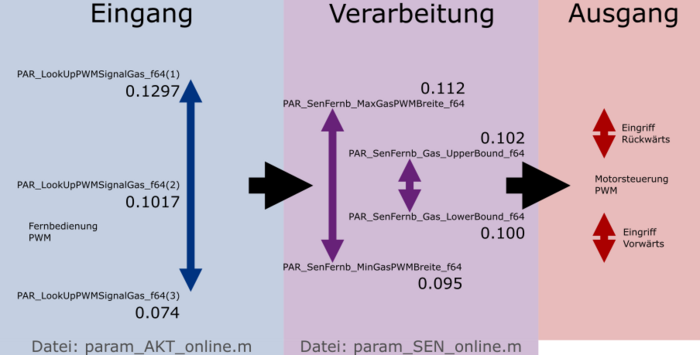 Abbildung 8: Schematische Darstellung der relevanten Parameter für die Ansteuerung des Antriebs mit der Fernbedienung
Abbildung 8: Schematische Darstellung der relevanten Parameter für die Ansteuerung des Antriebs mit der Fernbedienung

Längsregelung
Im Folgenden werden die relevanten Parameter für den Fernbedienungseingriff erläutert. In Abbildung 1 sind die Parameter für den Eingang, die Verarbeitung und den Ausgang dargestellt. Unter jedem Abschnitt ist der Dateiname angegeben, in dem die Parameter definiert sind. Die Pfeile stellen quantitativ den Wertebereich dar, um den Zusammenhang der Parameter untereinander besser zu verstehen.
Die drei Parameter im blau hinterlegten Eingang beschreiben den Maximalem PWM Wert PAR_LookUpPWMSignalGas_f64(1) (Fernbedienung maximal rückwärts), den Minimalen PWM Wert PAR_LookUpPWMSignalGas_f64(2) (Fernbedienung maximal vorwärts) und den PWM Wert PAR_LookUpPWMSignalGas_f64(3), wenn der Gashebel der Fernbedienung in der Mitte steht. Diese Parameter konnten mit dem Plot im ControlDesk Layout "Fernbedienung" abgelesen werden.
Im violett hinterlegten Bereich Verarbeitung werden die beiden Parameter PAR_BSFLaengs_FahrpedalSoll_Min_f64 und PAR_BSFLaengs_FahrpedalSoll_Max_f64 dargestellt. Diese sind Prozentwerte und begrenzen die maximal nutzbare PWM-Breite für das Ansteuern des Antriebs, sodass der Regler nicht die gesamte Leistung nutzen kann.
-
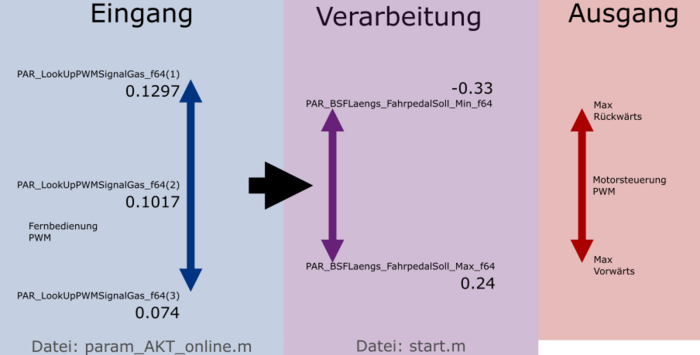 Abbildung 9: Schematische Darstellung der relevanten Parameter für die Ansteuerung des Antriebs mit der Längsregelung
Abbildung 9: Schematische Darstellung der relevanten Parameter für die Ansteuerung des Antriebs mit der Längsregelung

Parameter im Simulink Model
In den Abbildungen 10 und 11 wird dargestellt, welche Parameter wo im Simulink Model genutzt werden.
-
 Abbildung 10: Darstellung des Simulink Blocks: AktRtiPwm - PWM4fach-Modul der RTI-Bloecke und die hier erläuterten Parameter
Abbildung 10: Darstellung des Simulink Blocks: AktRtiPwm - PWM4fach-Modul der RTI-Bloecke und die hier erläuterten Parameter

-
 Abbildung 11: Darstellung des Simulink Blocks: SenFernb - Fernbedienung und die hier erläuterten Parameter
Abbildung 11: Darstellung des Simulink Blocks: SenFernb - Fernbedienung und die hier erläuterten Parameter

{kind=link}
Weblinks
LRP FLOW WORKSTEAM BL REGLER
Flow WorksTeam BL Regler Software
SVN-Ordner der Reverse-Firmware
LRP Firmware Update Tool 2.2.0 - Windows
Literatur
Software, Anleitungen und Firmware sind Abgelegt unter
https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Software/LRP_Regler/